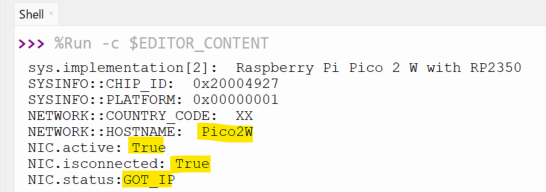
前回は「後攻、有線LAN」だったので今回は「先行、無線LAN」に戻ります。前々回、無線LANはラズパイPico 2 W上のMicroPythonから手近なアクセスポイントに接続できたところで終わってました。今回は、プラットフォームとネットワークの接続ステータスなどをも少し丁寧に確認していきたいと思います。
“Pico三昧(62) ラズパイPico 2 W、WiFi ネットワーク・ステータス” の続きを読む
Pico三昧(62) ラズパイPico 2 W、WiFi ネットワーク・ステータス
デバイス作る人>>デバイス使う人>>デバイスおたく
前回は「後攻、有線LAN」だったので今回は「先行、無線LAN」に戻ります。前々回、無線LANはラズパイPico 2 W上のMicroPythonから手近なアクセスポイントに接続できたところで終わってました。今回は、プラットフォームとネットワークの接続ステータスなどをも少し丁寧に確認していきたいと思います。
“Pico三昧(62) ラズパイPico 2 W、WiFi ネットワーク・ステータス” の続きを読む
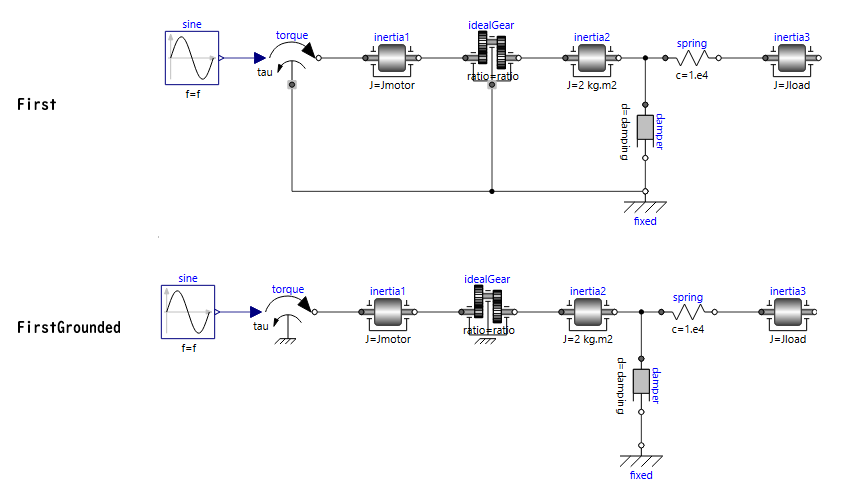
OpenModelica付属のデモを経めぐってます。前回まで「並進運動」デモを鑑賞してきました。まだデモは残っているのですが、「新たな刺激」を求めて今回から「回転運動」デモ(Mechanics>Rotational)へ進出デス。 トルクと慣性モーメント(イナーシャ)の支配する世界ね。ホントか?