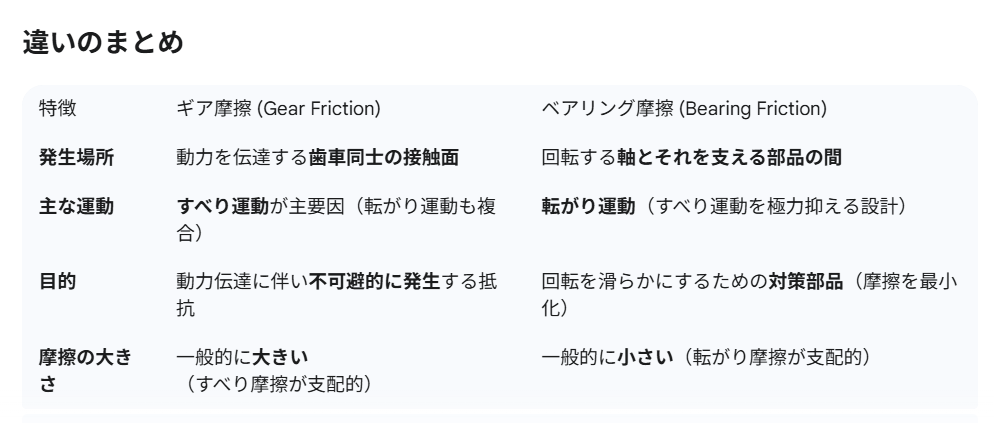
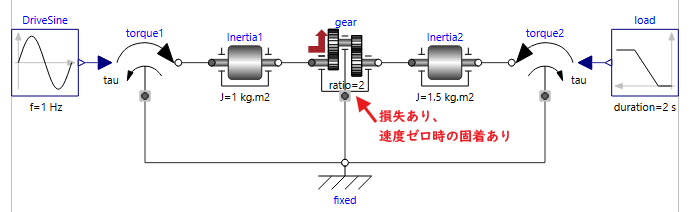
OpenModelica付属デモ巡回中。「回転運動」デモ(Mechanics>Rotational)の4回目。前回は損失のあるギア1個でムツカシーと「頭を抱え」ました。しかし今回は損失のあるギアに加えてベアリングも登場。ベアリング無くしてほとんどの機械は成り立ちませぬ。必須な部品ね。どうなるんだ。 “ブロックを積みながら(226) OpenModelica 回転運動、ギア摩擦とベアリング摩擦” の続きを読む
ブロックを積みながら(226) OpenModelica 回転運動、ギア摩擦とベアリング摩擦