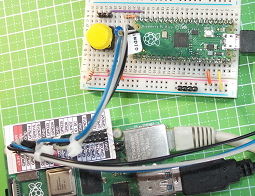
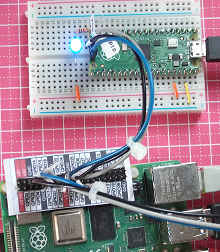
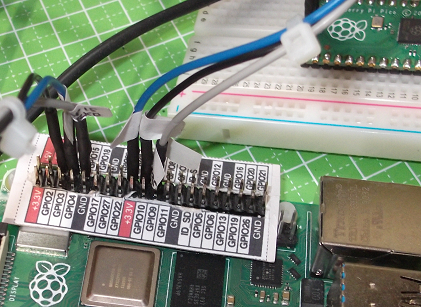
他のマイコンでPIOと言えばパラレルIOでしょうが、ラズパイPico(のRP2040マイコン)では違います。プログラマブルIO。CPUとは独立に動作するIO専用のステートマシン。「MicroPython的午睡」シリーズで何度か使ってみましたが、C/C++から使うときはお作法が違う、ということで今回はPIO使ったオブジェクトのビルドのサンプル、bit-bangingを。
鳥なき里のマイコン屋(134) ラズパイPico、C/C++SDKでプログラマブルIO
デバイス作る人>>デバイス使う人>>デバイスおたく
他のマイコンでPIOと言えばパラレルIOでしょうが、ラズパイPico(のRP2040マイコン)では違います。プログラマブルIO。CPUとは独立に動作するIO専用のステートマシン。「MicroPython的午睡」シリーズで何度か使ってみましたが、C/C++から使うときはお作法が違う、ということで今回はPIO使ったオブジェクトのビルドのサンプル、bit-bangingを。
別シリーズのMicroPythonの方でマルチコアやっていたので、C/C++SDKでもやった気になっていました。仕切り直し。C/C++SDK環境(VS Codeでリモート接続)でマルチコアを動かして、デバッガを使ってみます。お手軽にデバッグできるんだが、腑に落ちない挙動が一つ。概ねOKだから、また今度ね。いい加減な。
あれ、このPico何書き込んであったかな?老人の忘却力とて、先週書き込んだプログラムが何だったのか思い出せない、ということは不可避なんであります。しかし流石Raspberry Pi、素晴らしいツールが用意されていました。picotool。ラズパイPicoのFlashの中のオブジェクトの情報を取り出せるツールです。
昨日の投稿にてラズパイPicoのPWM出力を使ってみました(トホホ2つ。)基本的な設定はデフォのまま動作させましたが、PWMのカウントの元になるクロックは何なの、周波数はいくら、などいくつも疑問を持ちました。今回は実験しながらそのあたりをハッキリさせていきたいと思います。
先週からRaspberry Pi Pico C/C++ SDKをボチボチと試用しております。前回は高水準なTimer関数(インターバルタイマ)を勉強。まずは基礎からということで今回はGPIOです。ただ読み書きするだけでは面白くないので、端子からの割り込みをトリガにワンショットタイマも動作させてみたいと思います。
“鳥なき里のマイコン屋(130) VS CodeでラズパイPico、GPIOで割り込み” の続きを読む
前回まででPC上のVS Codeから、ラズパイPicoの母艦であるラズパイ4に接続してビルド&デバッグを行う環境ができました。環境ができるとホッとして止まってしまう。。。それではイケない。ボチボチとRaspberry Pi Picoの C/C++ SDKを使ってみて行きたいと思います。まずはTimerで定周期で関数を呼び出すところから。
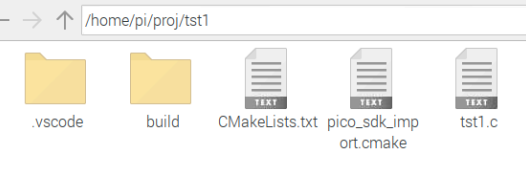
ビルドとデバッグ、2件のトホホを乗り越えて、ラズパイ4にリモート接続のVS Codeを使ってのラズパイPicoの開発環境整備も山は越えた?感じです。でも必要なプロジェクトファイル類、まだ手動で準備しているものが多いんでないかい。いつものことながらラズパイの中の人はそんなことお見通し、自動化ツールがありました。
前日の「信号品質問題」により60cm長の3本組ケーブルが余りました。この有効活用をかね、以前から試してみたかったArduinoのFirmataというものを動かしてみました。ホストに接続したマイコンのIOなどをホストから自在に制御するためのプロトコルというかライブラリです。これでラズパイからArduinoを手足(手下?)にできる。
4月にようやくRaspberry Pi Picoを1枚購入後、ずっとMicroPythonで動かしてきました。でもま、ずっと気になっていたのが、ボードの短辺にDEBUGと書かれてある3端子。今回は重い腰を上げて、C/C++のビルドからGDBでデバッグまで一通り動かしてみました。ようやくDEBUG端子の活躍の場ができた?

前回、M5StackとArduino Uno間でCANフレームの送受信ができるようになりました。しかしCANは「バス」です。1対1で通信できても物足りませぬ。そこで今回はST MicroelectronicsのSTM32マイコン搭載、Nucleo-F072RBをCANバスに接続してみます。でもね、PHYはMicrochip製MCP2562。
前回はM5StackからArduino Unoへ向かって一方通行のCANフレームの通信を行ってみました。当然、今回は双方向での通信の確認であります。お手軽にM5Stack発でUno経由M5Stack着の「ラウンドトリップ」です。同じArduino IDE使用で同じような仕事ですが、衣の下がちょっと違うのが見えまする。 “鳥なき里のマイコン屋(124) M5StackとUno間、CANフレームのラウンドトリップ” の続きを読む

別シリーズにてArduino用のCANバスIFと、M5Stack用のCANバスIFを手に入れ、ぞれぞれCANフレーム送信をロジアナ機能で確認いたしました。当然次のステップとしては2つをCANバスで接続して通信できることの確認です。今回はM5StackからArduinoへ一方通行にしたので簡単。

ようやくと言うべきか、GW前にRaspberry Pi 4 を手に入れました。先に入手のRaspberry Pi Picoの母艦にする、というのが主目的であります。情報もそろい、ツールなども完備のラズパイなので、OSのインストールからクロス開発環境のセットアップなど「スムース」ではあるのですが、例によって引っかかるところもあり。 “鳥なき里のマイコン屋(122) Raspberry Pi 4到着、ラズパイPicoの母艦化” の続きを読む

半導体不足が深刻化する中、僥倖というべきでしょうか。Raspberry Pi Picoにつづき、BBC micro:bit V2もゲットであります。NORDIC社製nRF52833搭載。桜田モモエ先生も連載小説に書かれていましたが、半導体不足のときは実需の何倍もの需要が現れて一気に品薄になるのが通例。しかし今回は中国勢の買い漁りもあり先鋭化でしょうか。しかし山高ければ谷深し、後の事を考えると難儀なことです。 “鳥なき里のマイコン屋(121) nRF52833搭載 BBC micro:bit V2到着” の続きを読む