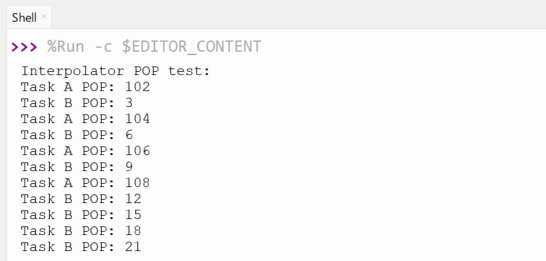
前回はRISC-Vプラットフォームタイマを試用。このHWは唯一無二。今回はラズパイPico系にユニークなインターポレータを試用してみます。コア毎に2個のインターポレータを装備、そして1個のインターポレータには2レーンあり、合計8個の演算パスを平行利用可能です。今回は基本操作POPをつかって等差数列を生成してみます。
“Pico三昧(58) ラズパイPico2:RP2350、インターポレータ” の続きを読む
Pico三昧(58) ラズパイPico2:RP2350、インターポレータ
デバイス作る人>>デバイス使う人>>デバイスおたく
前回はRISC-Vプラットフォームタイマを試用。このHWは唯一無二。今回はラズパイPico系にユニークなインターポレータを試用してみます。コア毎に2個のインターポレータを装備、そして1個のインターポレータには2レーンあり、合計8個の演算パスを平行利用可能です。今回は基本操作POPをつかって等差数列を生成してみます。
“Pico三昧(58) ラズパイPico2:RP2350、インターポレータ” の続きを読む
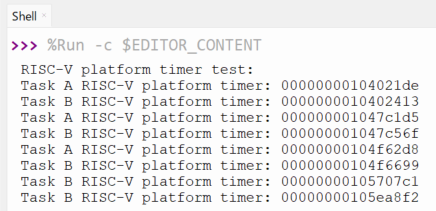
前回はHWスピンロックを試用。処理系が「時々」使うことがあるらしい機能を勝手に直接利用して前回はタマタマ動作しましたが、その後、案の定マズイ場合にも遭遇。そゆときは番号変えると動くかも。さて今回はRISC-Vのプラットフォームタイマを読み出してみます。RISC-VといいつつRP2350ではArmコアでも読めるみたい。
“Pico三昧(57) ラズパイPico2:RP2350、RISC-V プラットフォームタイマ” の続きを読む
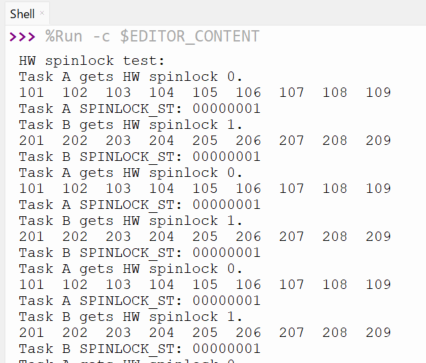
前回はMicroPython処理系が備えているlockをつかって2コアの排他制御を試みました。今回はラズパイPico/Pico2に特有なハードウエア・スピンロック機構を使ってみます。RP2040のときには有用であったHWスピンロックですが、RP2350では後ろ向きの機能になってます。でも使えることに変わりありませぬ。 “Pico三昧(56) ラズパイPico2:RP2350、HWスピンロックの試用” の続きを読む
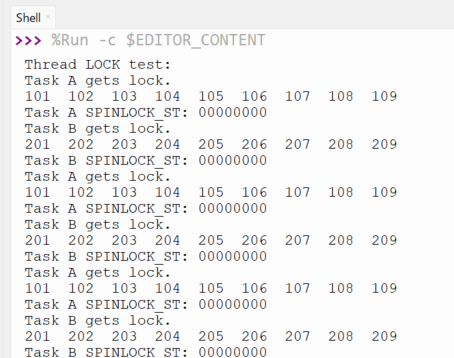
前回は2コア平行動作でコア間FIFO通信を使用。FIFOは制御がお楽。しかしその先を考えると排他処理など必要じゃないかと。一応PicoのRP2040にもPico2のRP2350にもSIOブロック内にハードウエアSpinlockというものがあるのだけれども、これってどうよ?その前に_ThreadモジュールのLOCKか?
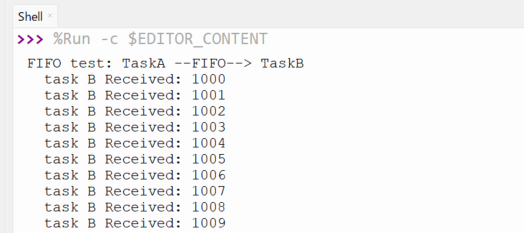
MicroPythonメインの別シリーズがあるのに、こちらでやっているのはRP2350のハードを直接操作するような実験をしているため。何にしてもMicroPythonはお楽。ただしMicroPython処理系の予期せぬところを触ってヤバイことになることもあり。前回は2コア実行、今回はコア間の通信機能を使ってみます。
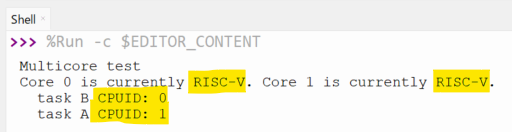
前回はイネーブルになっているデュアル・コアはそれぞれArmなんだかRISC-Vなんだかハッキリしろい、ということでステータスレジスタを読み出して確認しました。しかし、2コアの片方しか動かしてなかったです。今回は超簡単な実験スクリプトで2コアの両方が動いているところを確認したいと思います。手抜きだけれども。
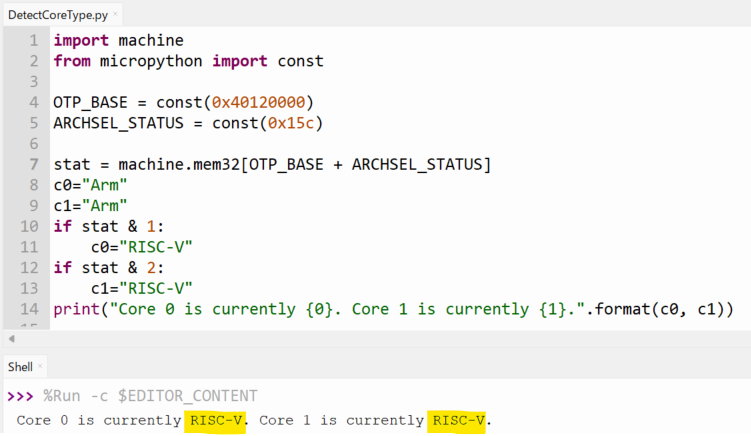
前回RISC-Vモード用のMicroPythonをラズパイPico2にインストール。しかしRISC-Vだろうが、ArmだろうがMicroPythonなので見た目は変りませぬ。処理系自体はRISC-Vで走っていると表示してます。しかし疑り深いので、今回は本当にRISC-Vで走っているのだよね、と確認してみたいと思います。
“Pico三昧(52) ラズパイPico2:RP2350、MicroPythonでコア確認” の続きを読む
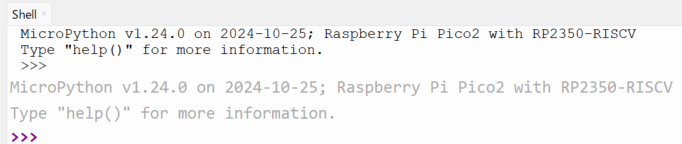
前回まで文書ばかり読んでいたので実機をいじりたくムズムズ。たまたまMicroPythonのサイトみたらば、以前試用させていただいたときにはまだPreview版だったPico2用のバイナリがReleasesになってました。それどころか以前不在だったRISC-Vモード用もリリースになってました。これは使ってみるしかない!
“Pico三昧(51) ラズパイPico2:RP2350、MicroPythonでRISC-V” の続きを読む
前回は絶対最大定格でした。何のかんの言ってもPicoもPico2も必要最低線の記述あり。頭の固い年寄なので絶対最大定格の後は、DC特性、AC特性が続くものと期待してしまいます。ただこの頃の各社の文書を拝見すると必ずしもそういう章立てでないこともあるみたい。ただしPico、Pico2に関してはAC関係の記述簡素すぎ。
今回は電気特性の冒頭付近に書かれている「絶対最大定格」。RP2040とRP2350を比べるだけではイマイチな感じがあったので、日米欧のマイコン業界の巨人?ルネサス、マイクロチップ、STエレクトロニクスの3社のチップの「絶対最大定格」とも比較してみましたぞ。まあ各社クセはあるけれども必要なことは書かれている。大丈夫か?
今回はHSTXです。Pico2のRP2350で新規搭載。しかし「源流」はPicoのRP2040上で実現済のPico-DVI-Sockなる発明品のようです。RP2040上にハードは無いケド、上位互換的な。ラズパイに精通した姉貴、兄貴には何の不思議もないけれど、ラズパイ素人老人にはキツイよ。だいたい回路もアクロバティック。
“Pico三昧(48) ラズパイPico2:RP2350、Pico:RP2040、HSTX” の続きを読む
今回はSHA256アクセラレータです。ハッシュ計算用ハードウエアです。セキュリティに配慮したモダーンなマイコンで時々搭載されとる回路です。前回同様、RP2350には搭載されていますがRP2040には不在。それでは寂しいのでハッシュ素人老人が、ATSAMD51のハッシュ計算器と比較してみましたぞ。
今回はTRNG(True Random Number Generator)です。Pico2のRP2350にはTRNGが搭載されとりますが、PicoのRP2040には不在。2チップの比較というとそれでおしまいになってしまいます。それでは寂しいので乱数素人老人が、コマケー話を追加してみましたぞ。大丈夫か?
今回はUSBです。RP2350のUSBは大まかな機能、性能はRP2040と同等。そしてソフト的にも「上位互換」みたいです。SDK使ってプログラムを書くつもりの「よゐこ」にとっては特に気にするところもないんじゃないでしょうか。知らんけど。しかしUSBの「ハードに近いところ」で修正、改良、機能追加いろいろあるみたい。
“Pico三昧(45) ラズパイPico2:RP2350、Pico:RP2040、USB比較” の続きを読む