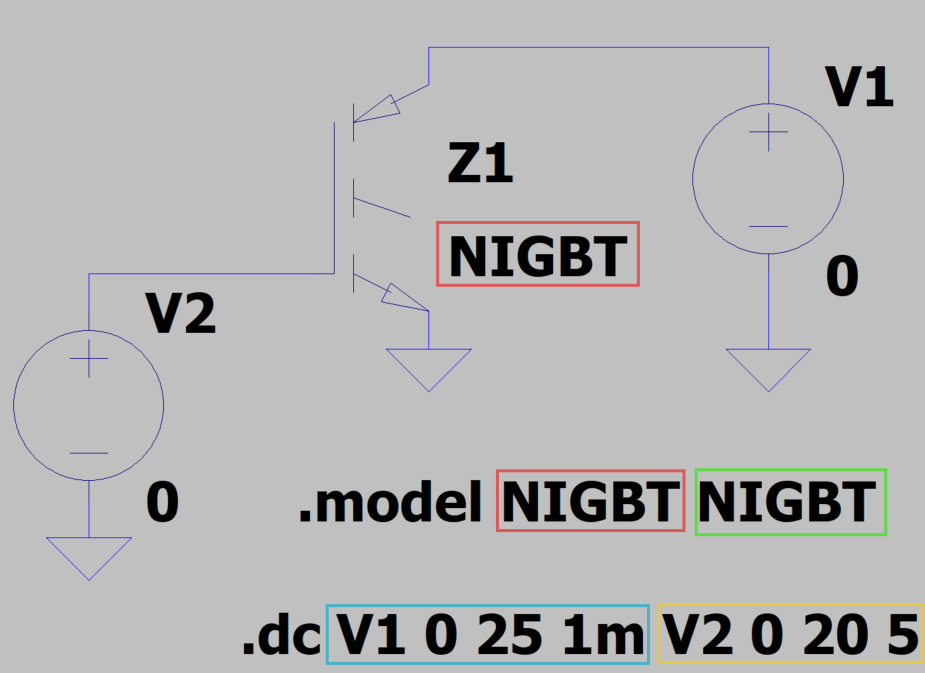
LTspice配下のExampleフォルダ内Educationalフォルダ所蔵の回路図を経めぐってます。前回は謎のサブサーキットでした。今回は、IGBT(絶縁ゲート型バイポーラ・トランジスタ)です。 高電圧・大電流のスイッチングに使われるMOSFETとバイポーラの合わせ技的パワーデバイスです。まあDC解析は単純明快?
SPICEの小瓶(73) LTspice、{Educational} IGBTのDC解析
デバイス作る人>>デバイス使う人>>デバイスおたく
LTspice配下のExampleフォルダ内Educationalフォルダ所蔵の回路図を経めぐってます。前回は謎のサブサーキットでした。今回は、IGBT(絶縁ゲート型バイポーラ・トランジスタ)です。 高電圧・大電流のスイッチングに使われるMOSFETとバイポーラの合わせ技的パワーデバイスです。まあDC解析は単純明快?
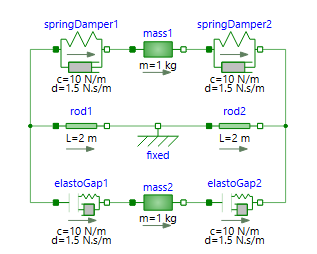
前回はOpenModelica付属のExampleの中からVehicleデモを鑑賞。今回は、どちらもスプリングとダンパからなる「似た」コンポーネントSpringDumperとElastoGapの特性を比較しているElastoGapデモを動作させてみます。ギャップがあると、一気に複雑な特性をモデリングできるみたい。
“ブロックを積みながら(218) OpenModelica 並進運動、ElastoGapモデル” の続きを読む
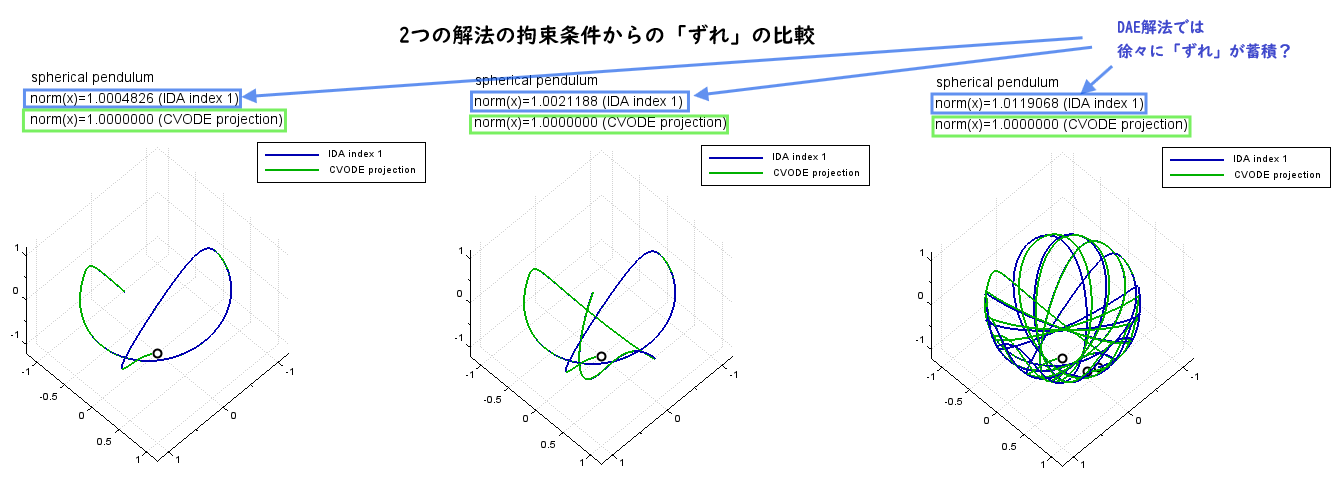
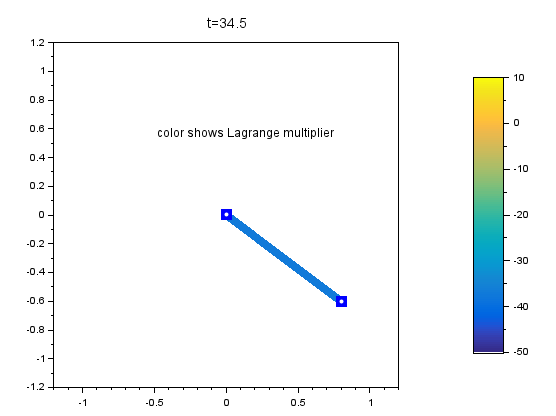
信号処理素人老人がScilabの「信号処理のデモ」からカテゴリ脱出。前回は何を今更の「単振り子」でちょっとイカした?モデリングでした。今回も過去回でやった記憶が残る「球面振り子」です。今更やるからにはSUNDIALSのソルバで解くだけでなく、2つの解法を比較しているみたい。拘束条件からのズレが白日の下に?
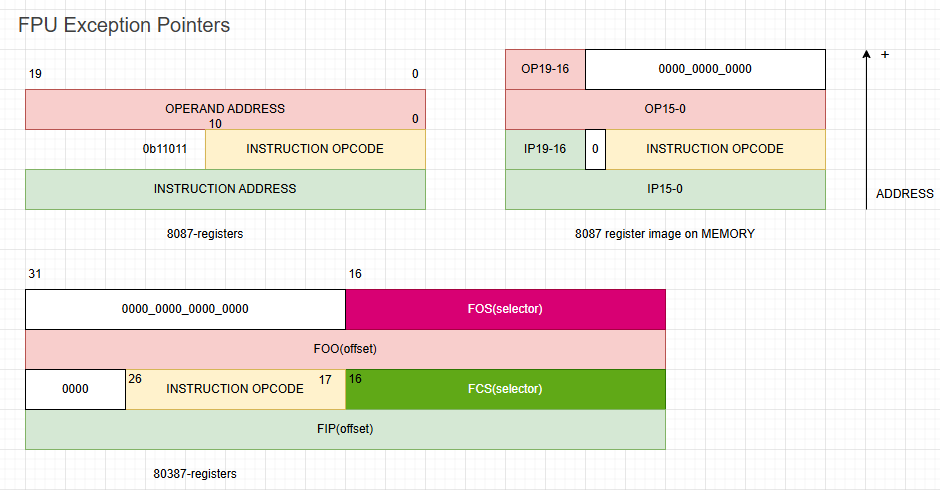
前回は8087ストア命令を練習。いつものように命令セットに非対称性がありました。しかし今回のあれやこれやに比べたらまだましだったかもしれません。今回はずっと顔を背けてきた(その割に使ってしまった過去回もあるけど)FPUの制御命令を一挙に列挙してみたいと思います。今回は強烈なメンバどもを拝観するだけ、練習はまた今度。
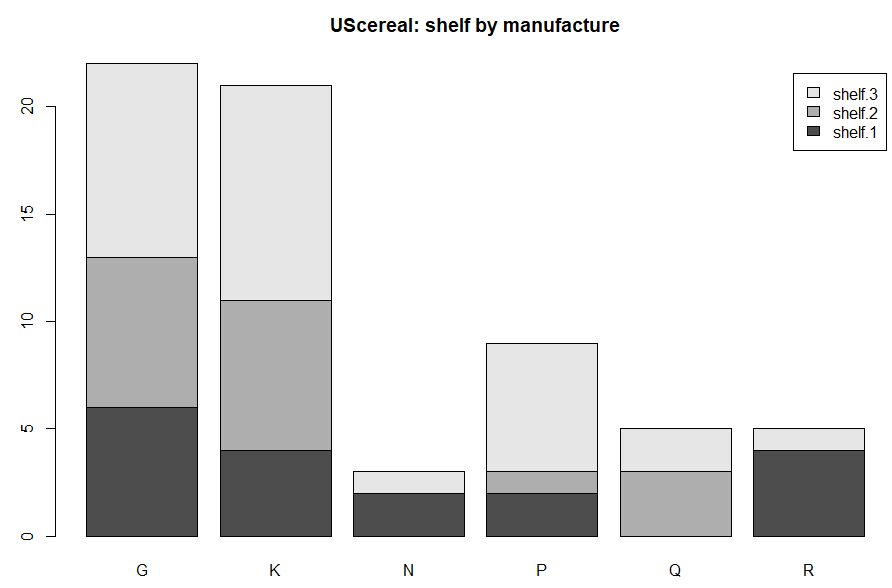
MASSパッケージのサンプルデータセットを巡回中。大文字優先のABC順。前回は交通事故と制限速度の関係でした。今回は「シリアル」です。牛乳やヨーグルトをかけて朝食にすることが多い、コーンフレークとかグラノーラみたいな食品です。そういえばお惚け老人も今朝そのようなものを食べたような。食べたもの忘れてるのは忘却力ヤバイよ。 “データのお砂場(201) R言語、UScereal、 朝ごはんにシリアル? {MASS}” の続きを読む
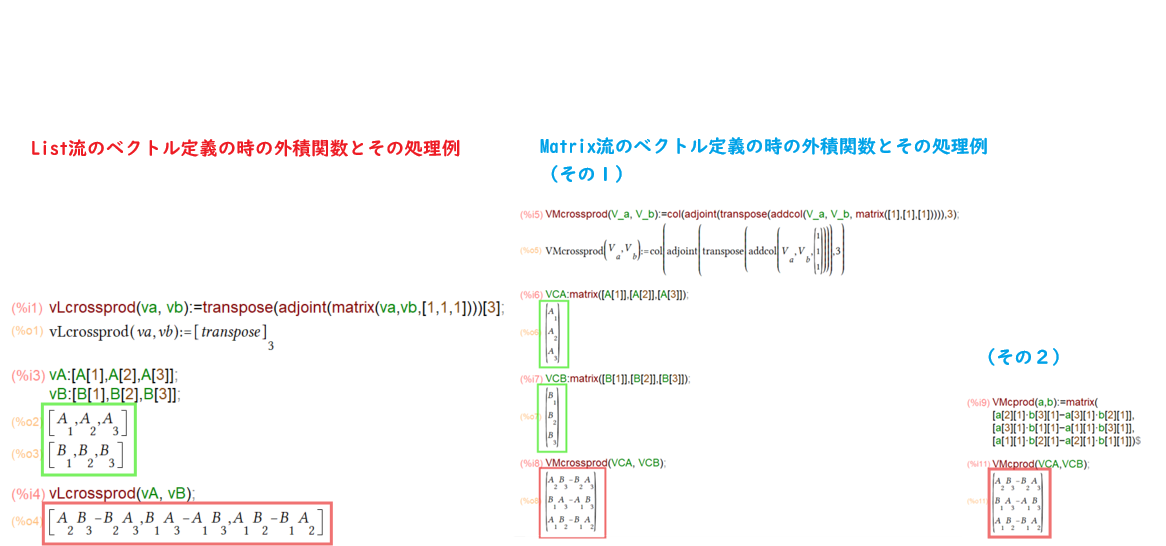
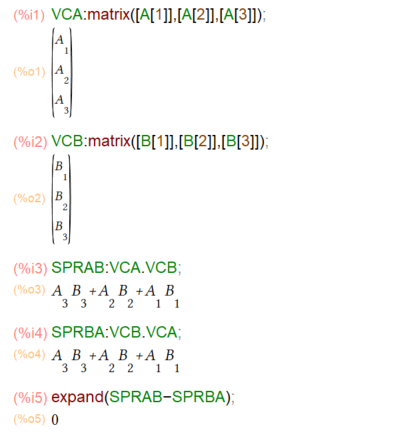
溝口純敏様著「Maxima を使った物理数学基礎演習ノート」(以下「演習ノート」と略)を拝読中。前回は内積でした。内積(スカラー積)あれば、外積(ベクトル積)あり。今回は、Maximaにおけるベクトル表記のList流とMatrix流の2流派それぞれについて、外積の計算を行ってみたいと思います。外積はちょっとメンドイ? “忘却の微分方程式(210)Maximaを使った物理数学基礎演習ノートを読む、ベクトルの外積” の続きを読む
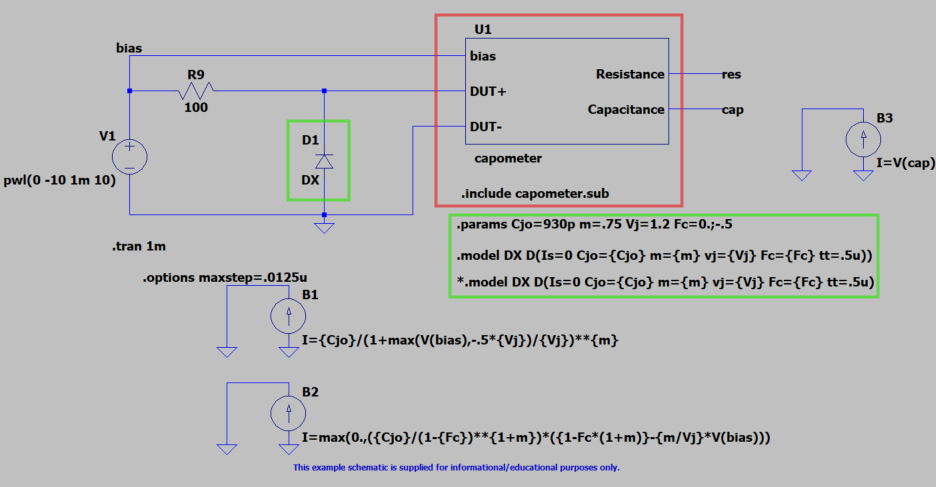
LTspice配下のExampleフォルダ内Educationalフォルダ所蔵の回路図を経めぐってます。前回は「TRIACとDIAC」でした。今回は capometer という謎のサブサーキットを登載したFc.ascです。 どうもバラクタ(可変容量ダイオード)のC-V特性「測定用」の回路みたいっす。しかし謎が多いデス。
“SPICEの小瓶(72) LTspice、{Educational} 謎のcapometer” の続きを読む
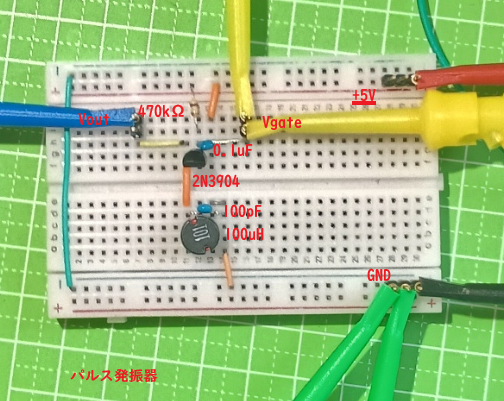
アナデバ様のWeb記事『StudentZone』の2025年7月号(日本語版)の実習2回目です。前回シミュレーションしたパルス発振器(リンギング発振器)をブレッドボード上に実装し、実機動作を観察してみる回です。シンプルな回路なので実装も簡単、発振もお手軽、ホント大丈夫か?
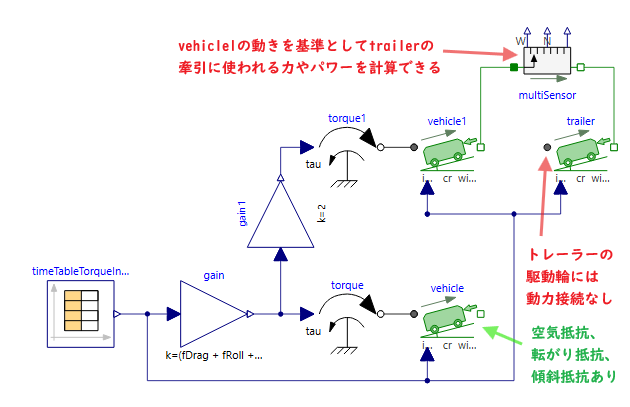
前回はOpenModelica付属のExampleの中から「渦電流ブレーキ(eddy current brake)を鑑賞。今回は地上走行車両(自動車、列車など)のモデル、Vehicleを動作させてみます。シンプル・モデルといいつつ、質量、回転モーメント、空気抵抗、転がり抵抗、傾斜抵抗など含まれてます。 “ブロックを積みながら(217) OpenModelica 並進運動、Vehicleモデル” の続きを読む
信号処理素人老人がScilabの「信号処理のデモ」からカテゴリ脱出。前回はSUNDIALSのcvodeソルバ使ったパラメータ推定でした。今回はidaソルバで解く「単振り子」です。単振り子、過去回で何度となく練習した記憶。なにをいまさらという感じもしないでもないです。しかし今更やるからにはそれなりみたい。
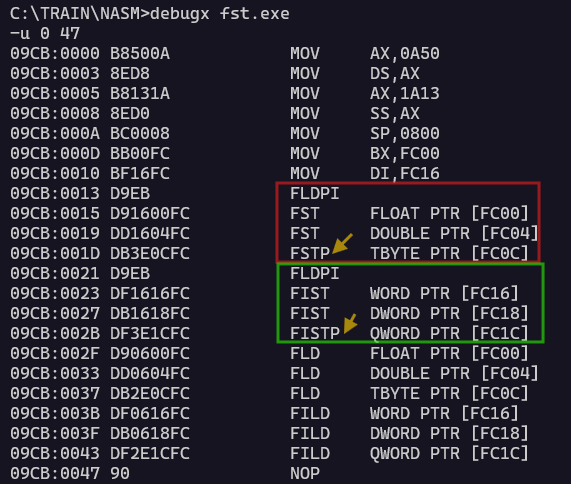
前回は8087のpacked な BCD 整数のロード、ストア命令がなんで18桁なのか年甲斐もなく悩んでみました。今回はフツーの浮動小数とフツーの整数(2の補数)のストア命令を練習してみます。そんなの簡単じゃん、といいつつ、そこはx86一族です。ここにも命令セットの非対称性あり。いつものコマケー話なんだが。
“ぐだぐだ低レベルプログラミング(232)x86(16bit)、FST、ストアあれこれ” の続きを読む
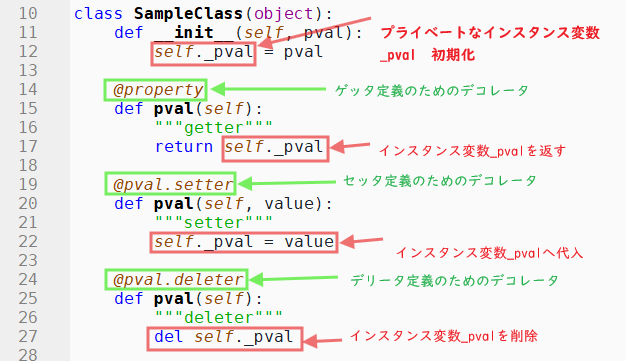
「サイエンティフィックPythonのための」IDE、Spyder上にてScientific Python Lecturesの実習中。今回もデコレータの練習です。今回は処理系に備わっているデコレータを使ってClass定義にセッタ、ゲッタ、デリータを追加してみます。ちょっとクセ強な風味だけれどもプロパティ使えばOKよ。 “ソフトな忘却力(116) Pythonのデコレータで、ゲッタ、セッタ、デリータ” の続きを読む
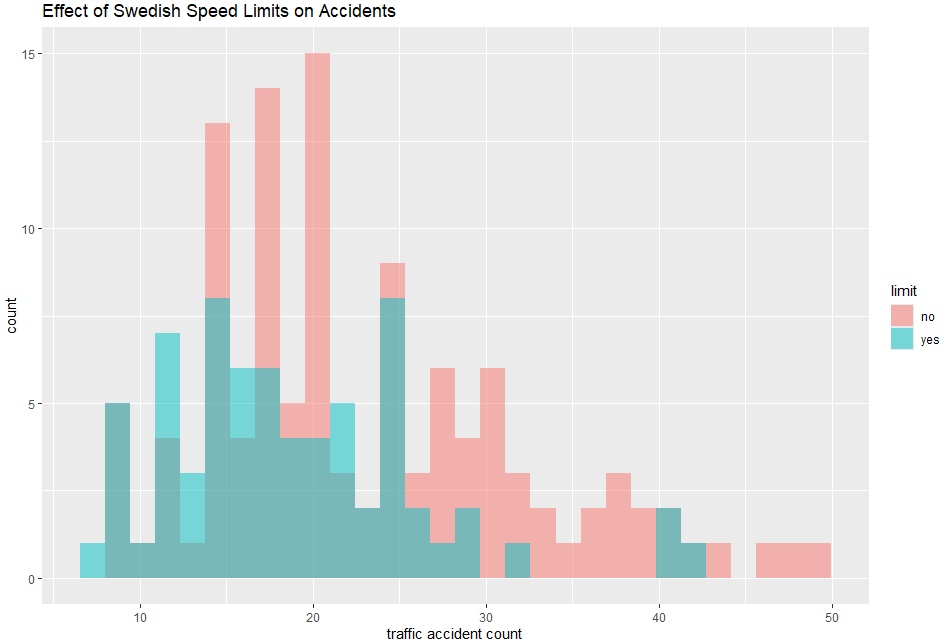
MASSパッケージのサンプルデータセットを巡回中。大文字優先のABC順。前回は溶岩の組成でした。今回は交通事故と制限速度の有無の関係です。1960年代のスウェーデンにおけるデータです。どうもこの時代のスウェーデンは、自動車交通における先駆的な調査や「社会実験」的な挑戦を推し進めていたみたい。流石だなスウェーデン。
溝口純敏様著「Maxima を使った物理数学基礎演習ノート」(以下「演習ノート」と略)を拝読中。前回ついに「第4章 ベクトルとテンソル」突入。そこでMaximaにおけるベクトル表記法に2流派あることに気づきました。前回以前の過去回はリスト流、前回からは「演習ノート」の御流儀マトリックス流です。今回は内積ね。