前回、MathematicaとMaximaで同様な2Dプロットを試みておりました。しかし手元の古い版のMaximaでは実行できない関数があるということで途中で無念の?打ち切りと相成りました。そしてMaxima(GUIであるwxMaxima)をバージョンアップ。今回は更新したMaximaを使って前回歯が立たなかったプロットにリベンジ?大丈夫か?
忘却の微分方程式(17) 2D領域プロットリベンジ? MathematicaとMaxima
デバイス作る人>>デバイス使う人>>デバイスおたく
前回、MathematicaとMaximaで同様な2Dプロットを試みておりました。しかし手元の古い版のMaximaでは実行できない関数があるということで途中で無念の?打ち切りと相成りました。そしてMaxima(GUIであるwxMaxima)をバージョンアップ。今回は更新したMaximaを使って前回歯が立たなかったプロットにリベンジ?大丈夫か?

長らく眠っていたJetson Nanoを本日復活させました。眠っていた理由は電源です。Node-REDのサーバ機として活躍しているラズパイ3の電源が不安だったのでJetson Nanoの電源を「召し上げ」ラズパイ3に流用していました。後で買って戻すからといいつつ、ズルズル本日に至ってしまいました。ごめんJetson。
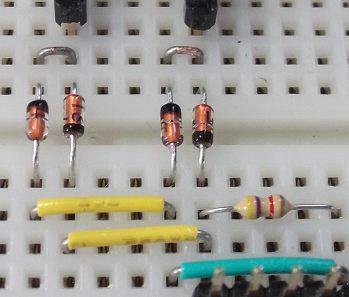
「アナデバ社(ADI社)のWeb記事『StudentZone』を初回からすべて読む」もようやく2019年8月号です。しかし今回は最初から2回に分割という不甲斐なさです。何といっても「実習」盛りすぎ、詰め込み教育です。ADALM2000になったら進行が加速した感じ。今回テーマのダイオード1N914の型番、老眼の目で読み取るのも辛いし。 “お手軽ツールで今更学ぶアナログ(60) ダイオード1N914で実験、詰め込み過ぎ その1” の続きを読む
前回のChangeノードは、「積荷」を載せ替えたりするためのものでした。今回のSwitchノードは、「行き先」への仕分けを担うもの、という感じです。仕分けの方法もいろいろあって非常に便利です。今回はその基本部分を使ってみますが、一見しただけでもなかなか便利。
前回までで「エッジ側」M5ATOM LiteとNode-REDサーバー(Raspberry Pi 3)との間でMQTTを介してJSONオブジェクトを送受できるようになりました。しかし不満なのは送受信のタイミングです。前回まで単一のmainループにお任せだったので便利とは言えない仕組みでした。今回から uasyncioを使って改良していきたいと思います。
今回は、シフト命令を使って行きたいと思います。ハッキリ言ってシフト系の命令冷遇されています。16ビットの圧縮命令にエンコードしてくれるオペランドは限られているし、ローテイト命令など基本命令セットであるRV32Iには含まれとりません。最低限必要なものは用意したので、後はコンパイラでよしなに、という感じですか。
別件でSTM32とRP2040でAD, DAを使っているので、ATSAMD51でもやるべしと思い立ちました。先立つものはサンプリング周波数のタイミングということでTC7でタイミング(割り込み)を作ろうとしてハマりました。なぜか割り込み立て続けに入り過ぎ。そのあおりでオブジェクトのダウンロードすら不能。困りました。
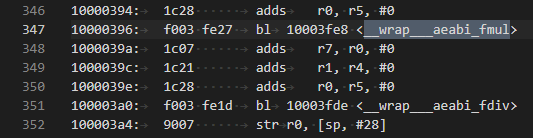
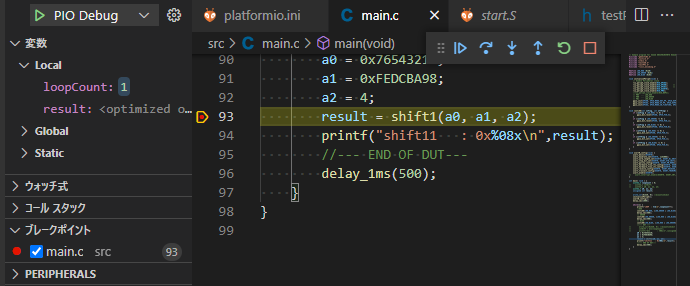
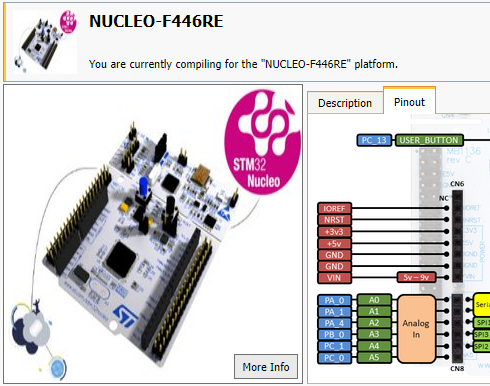
今回は1点確認するだけであります。ラズパイPico上で float型 を使ったら RP2040の内の「fast floating point」を呼んでくれているのだよね、と。ラズパイPicoで積極的にfloatを使いたいとは思わないのですが、昨日 Cortex-M4F機(STM32F446RE)の上で float していたので、Picoの上の浮動小数点はどうなの?と気になったためです。
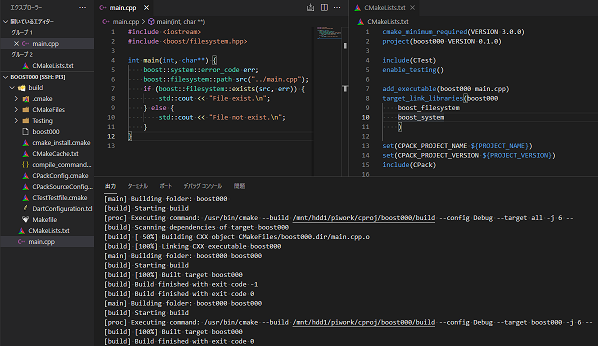
前回は、VS Code拡張 CMake Toolsが生成してくれたCMakeLists.txtを手修正して「お好み」の階層構造でビルドできることを確かめました。今回はインストール済のライブラリを使えるようにしてみます。リンクするライブラリはBoostの中からFilesystemを選んでみました。何も難しいことはないのだけれど、結局ポカはあるのね。
シリーズ3回目ともなり、ようやく今回はちょっとデジタル信号処理っぽいところに入れます。とはいえ、まずは「動かして効果を実感してみよ」という感じです。実際の信号処理は裏のライブラリで処理されているものを使っているだけでお勉強はまだ後です。しかしま、衣の下(鎧ですぞ)がようやくチラチラしてきました。
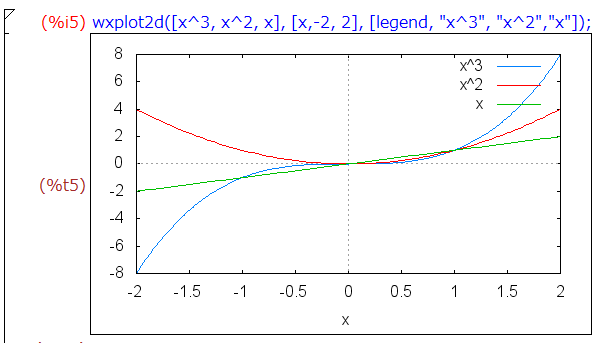
Raspberry Piを利用したWolfram言語プロジェクト により無償で使用できるMathematica(Wolfram言語)と、定番の無償ツールMaximaを使用している5回目は2次元のプロットです。今回は Maxima 不戦敗な感じ、どうも私の手元のMaxima古くてダメかも。新版を再インストールして仕切り直した方が良い感じです。
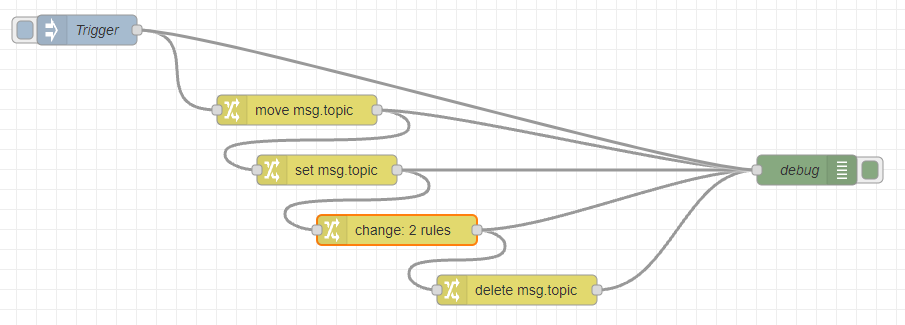
今回、Changeノードを使ってみて、その強力さをようやく理解しました。特にJSONata式を使うことでJSONオブジェクトに対してQueryをかける機能が良い感じです。この際、JSONataを勉強せねばと思いました。今まで Functionノードで書いていたもののかなりは Change ノードで代替可能に思えてきました。そして分かり易くて、書きやすい。今まで損していた?
前回から、ADALM2000使った実験シリーズに突入していますが、ADALM2000を持っていないので、Analog Discovery 2で代用させていただいております。さて今回はアナデバ社のオペアンプOP97、 OP27、OP37のループゲインを測れとのお題です。しかし、ちゃんと測れているのだか、いないのか、覚束ないことこの上なし。後でやり直しか?

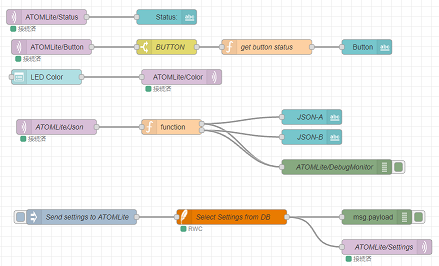
前回が「送信」であったので、今回は当然「受信」です。しかし受信で想定しているのは何か設定値がホストから指令されてくるというシーン。「設定値」ともなるとそれを保存しておく場所から用意しておかないとマズイ気がします。そこで、設定値はNode-REDからアクセスできるSQLiteのデータベースに記録しておき、それを取り出して送ることに。今のところ何も効果はないですが。