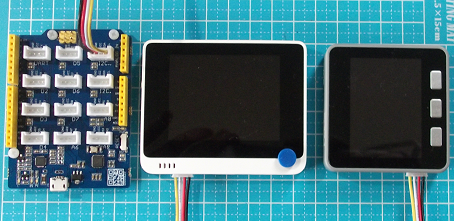
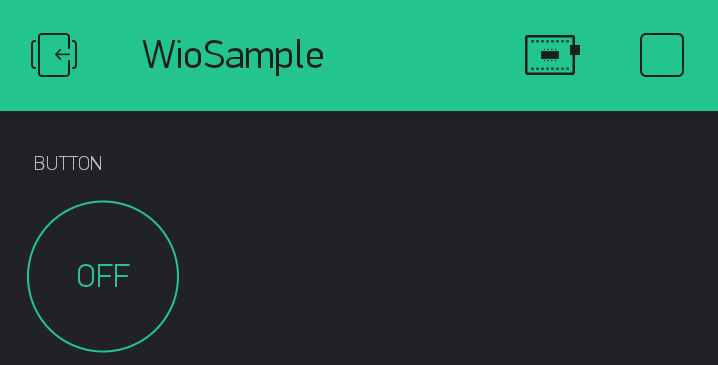
さて前回はBlynkを使って、Arduino互換に見えるArmコア端末Seeed社Wio TerminalのGroveコネクタに接続されたLEDをスマホから遠隔で点灯させてみました。今回は逆方向です。Groveコネクタに接続されたポテンショメータを「アナログ」で遠隔読み取りしてみようと思います。 “IoT何をいまさら(60) Blynkで遠隔AnalogRead” の続きを読む
IoT何をいまさら(60) Blynkで遠隔AnalogRead

デバイス作る人>>デバイス使う人>>デバイスおたく
さて前回はBlynkを使って、Arduino互換に見えるArmコア端末Seeed社Wio TerminalのGroveコネクタに接続されたLEDをスマホから遠隔で点灯させてみました。今回は逆方向です。Groveコネクタに接続されたポテンショメータを「アナログ」で遠隔読み取りしてみようと思います。 “IoT何をいまさら(60) Blynkで遠隔AnalogRead” の続きを読む
このところ、Groveコネクタご本家のSeeed社製のGroveモジュール、マイコンをいくつか手に入れました。4ピンのGroveコネクタ、物理的なコネクタ形状は皆互換なので、接続しようとすれば皆接続できてしまう。けれども、電気的に接続OKかどうなのかは、回路をよく調べてから接続しないといけないです。勿論、それを制御するソフトに変更が必要なこともままあります。今回は、Grove化されたBMP280圧力センサを異なるGroveホストに接続してみます。
Wio Terminalが使えるようになったので、早速、IoTらしいことをすべしということで、今回は Blynk という「IoTプラットフォーム」を使ってみることにいたしました。私のようなものが「お試し」する程度ならば無料のクラウドサービスであります。それなりの手間がかかるものと想像していたのですが、やってみたら本当にお手軽、「5分でIoTできる」と豪語しているのは本当でした。 “IoT何をいまさら(59) Wio Terminal, BlynkでIoT一撃?” の続きを読む
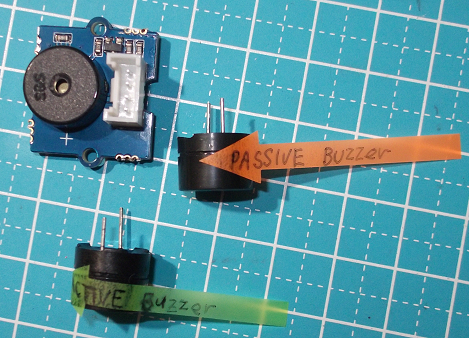
前回に続きSeeedStudio Grove Begineer Kitのモジュールを見てまいります。今回はブザーです。ピエゾブザーにはパッシブとアクティブ2タイプあるのですが、ビギナ・キット付属のモジュールはパッシブです。しかし手元の部品箱を調べたらアクティブ・タイプも出てまいりました。これを鳴らして比べてみることにいたします。
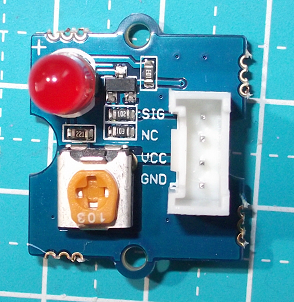
前回、SeeedStudio社(以下Seeed社)がGrove Beginner Kitに秘めた?野望に瞠目しつつ、沢山のGroveモジュールにご満悦でした。美麗な集合基板から取り出してしまうのをちょっと躊躇ったのですが、カットしてしまいました。まずは、一番「簡単」なGrove化されたLEDモジュールから見ていきたいと思います。 “部品屋根性(26) Seeed社、Grove LED モジュール” の続きを読む

別件で Seeed社のGrove Begineer Kitを購入したとき、Groveモジュールをネットワークに接続してIoT化すべし、ということで一緒に仕入れたものがありました。同じSeeedStudio製、Wio Terminalというデバイスです。ぶっちゃけ、市場的にはM5Stackともろ被り。しかし、味付けはいろいろ異なっています。
最初は「電子ブロック」的な教育用玩具?クリスマスプレゼントに最適な(余計なお世話か)と思ったんであります。美麗なパッケージにオールインワン、Grove Beginner Kit for Arduino。Seeed社伝統のGroveインタフェース接続の電子部品に加えてArduino互換機まで入っております。確かにBeginner向けにいたれり尽くせりなのですが、しかし、その裏にSeeedStudio社の野望?が隠されていることに気付きました。 “部品屋根性(25) Seeed社Groveビギナ・キットに見る野望?” の続きを読む
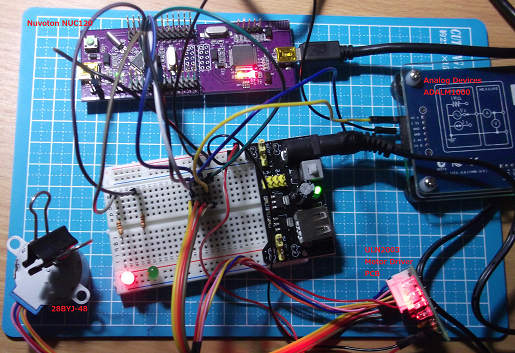
別シリーズで2回ほど28BYJ-48ステッピングモータを扱いましたが、Arduinoで制御していたので、肝心の波形はArduinoのライブラリ次第。こちらではNuvoton NUC120ボードを使って「下回り」から操作して波形を操作して様子を見てみようというわけです。PWM駆動もやるつもりですが、まずはタイマの周期割り込みでArduino同様の2相励磁でモータが回るところから。
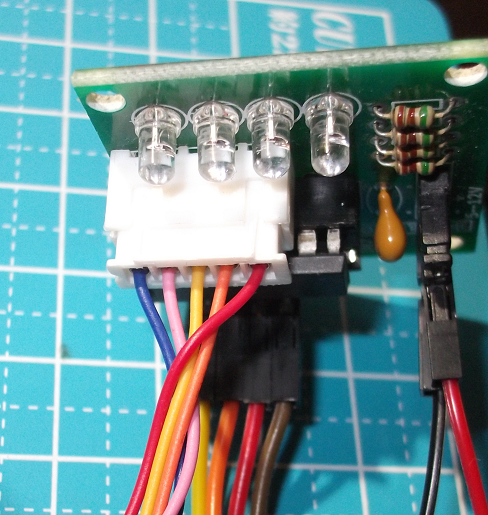
昨日、定番のステッパモータ28BYJ-48が回った回ったと喜びましたが、お楽しみの中華部品キットKuman K4付属の資料の結線に釈然としないものが残ったんであります。なんか変でないかい。気になったので、モータを駆動するULN2004チップを載せたPCBの回路を含めて自分で回路図を描いて確かめてみました。 “部品屋根性(24) ULN2003搭載PCB、怪しい回路図” の続きを読む

今回は、「電子工作業界」では泣く子も黙る?定番、ULN2003高電圧、高電流ダーリントン・トランジスタ・アレイと28BJ-48ステッパモータ(日本語ではステッピングモータというのは何故?)を取り上げさせていただきます。例によってお楽しみの中華部品キットKuman社K4キットに含まれていたので。

「ブロックを積みながら」前回の投稿が4月であったので、半年以上も間が空いてしまいました。前回までBlocklyの処理系をいじりながらVPLの「心」に近づきたいなどと思ってきましたが、方針を改めました。「使う側」から迫ろうと。ついては、最近ハードの方も原点回帰でArduino使うことが多いので、Arduino用のVPLの一つArduBlockを使ってみます。
前回、Holtek社のLEDマトリックス制御ICであるHT16K33を、素直にLEDに接続せず、単体のままAnalog Discovery2のロジアナ機能で波形を観察しようなどと邪な考えをしたために、かえって抵抗と配線のゴチャゴチャの中に沈みました。今回は、素直にLEDを接続してHT16K33がその能力を発揮するところを見てみます。接続するLEDは、1588BSと呼ばれているもの。 “部品屋根性(22) 8×8 LED Matrix, 1588BS” の続きを読む
Holtek社と言えば、台湾の立派なマイコン屋さんです。今回はHoltek社にしたら主力MCUの「お供」といった位置づけであろうデバイスを手にいれたので、それを使ってみます。RAM Mapping 16*8 LED Controller Driver with keyscanという長いタイトルのついたデバイス、HT16K33です。 “部品屋根性(21) Holtek, HT16K33” の続きを読む
中華FPGAの星?Anlogic社の廉価版FPGAの件、2回投稿したところで先が長くなりそうなので、シリーズ分けることにいたしました。まず、初回としては「極小の新規プロジェクト」をまっさらな状態から始めたいと思います。「極小のロジック」ということで信号反転、インバータ1個相当からであります。