昔「年にひとつくらいは新しい言語(コンピュータの)をおぼえろ」というのを読んだ記憶があり。でも年に一つは無理。だいたいこの10年くらいまったく新規なしです。これではいけない。Termuxの復活のお陰でスマホでLinuxできるようになったので、けっこう人気らしいGo言語をスマホの上で練習してみることにいたしました。
トホホな疑問(49) Termux、「普通に」使うための試行錯誤の結果
普段だと2日や3日電池が持つスマホなのですが、このところ減りが速いです。時間があるとTermuxいじっているから。なんといってもタッチキーでLinuxするにはいろいろ障害あり、記号キーは多いは、CTRLナンチャラ、METAナンチャラにファンクションキー。どうする?
ぐだぐだ低レベルプログラミング(58) RISC-V、整数と浮動小数の変換命令
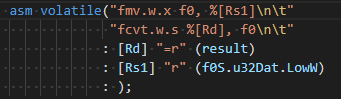
今回は浮動小数と整数の間で変換を行う命令fcvtを動かしてみたいと思います。16種類もあります。オペコード空間を節約しているRISC-V的にはかなり大きな一族です。それは、単精度と倍精度の浮動小数、32ビット幅と64ビット幅の整数、符号付と無、変換の方向の組み合わせがあるからです。今回は端折って4命令だけ動かしてみます。
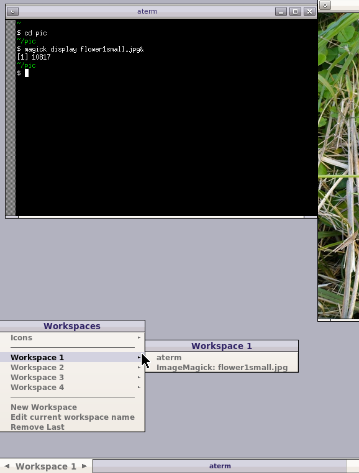
トホホな疑問(48) Termux、pkg-configでMagick++呼ぶcppをビルド
前回Androidスマホの上でXウインドウが稼働、user権限ですが本格的にLinuxです。しかしトホホな件がいくつも。その1つがImageMagickのAPIを呼び出すC++のコードをコンパイルできん、という1件。調べて分かったのは、Termuxのpkg-configちゃんと出来てる、ということ。これでビルド成功。
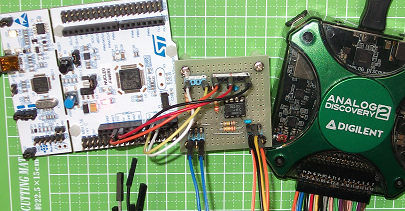
鳥なき里のマイコン屋(153) ルネサスRX210マイコン、Lチカまでの手続きに心が折れる

最近ルネサス様もArmに力を入れているだけでなく、RISC-Vまで始めたみたいです。世界の趨勢に追いついた?しかし、ヒネクレものとしては、「残された」ルネサス独自コアが気になります。今回「お手頃価格」のRX210ボードを入手したので、まずはLチカをやり、ルネサス御家流を復習したいと思います。
データのお砂場(24) R言語、Seatbelts、英国における道路交通事故の死傷者数
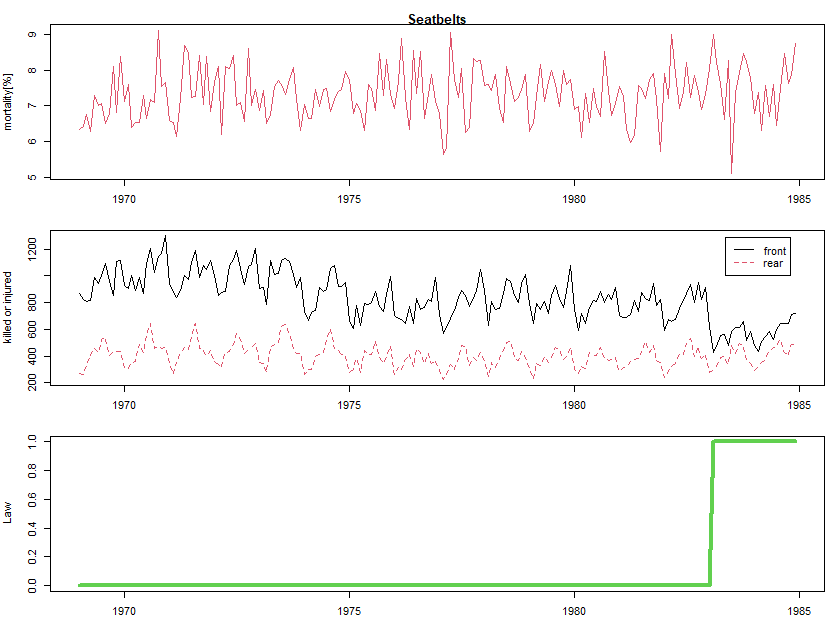
R言語のサンプルデータセットをABC順(大文字先)で端から試してみています。今回は英国の交通事故のデータです。かなり古いシートベルトの着用が法制化される前後のもの。シートベルトの効果が分かる?時系列データで季節変動もあり、その中で法律の施行やら燃料費やらがどう影響を与えているのか処理せよと。 “データのお砂場(24) R言語、Seatbelts、英国における道路交通事故の死傷者数” の続きを読む
MicroPython的午睡(65) ラズパイPico、アナログコンパレータのトリップ電圧
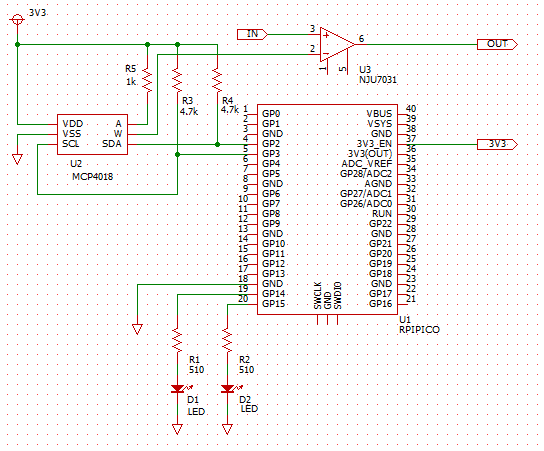
前回MicroChip社製MCP4018デジタルポテンショメータをラズパイPicoに取り付けて制御。I2Cで制御できる「可変抵抗」です。今回は応用例としてデータシートに載っているアナログコンパレータの閾値調整をやってみます。想定の応用はセンサなどからのアナログ信号がある閾値を超えたらマイコンに割り込むとか。
忘却の微分方程式(42) 反復練習6、行列式その1、Maxima on Android
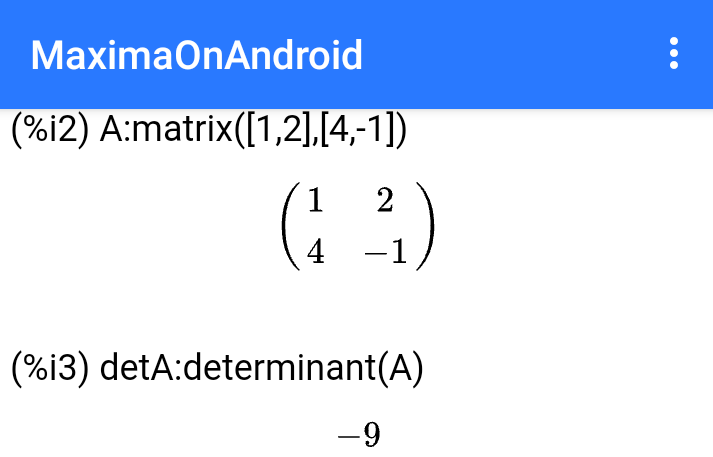
前回に続き今回もスマホ上で動作するMaxima on Androidを使わせていただいて練習したいと思います。題材は行列式です。Maxima様相手にサラスの公式範囲にサイズを制限する理由は何もないのですが、入力がメンドイのと手計算用の例題を下敷きにしているので、今回はサラス公式で手計算できる3次範囲です。
手習ひデジタル信号処理(30) Weaver変調器による周波数シフタその3、入力BPF特性
前回は、Weaver変調器による周波数シフタの全体コード(三上先生のコードそのまま)をビルドして実際に周波数シフトが起こっていることを実機上で確認いたしました。今回は、要素部品のうち初段の帯域通過フィルタの特性を実機で確認してみます。処理対象の100Hzから4.5kHzまでの周波数のみを通すもの。
トホホな疑問(47) Androidスマホの中でVNC接続、TermuxのGUI
前回、スマホにSSH接続できたものの、トホホ勃発でTermuxの再インストールが必要でした。今回は気を取り直して対処してGUIを動作させてみました。GUIの動作確認は「一応」できたのですけれど、あれこれトホホがアチコチに散在。なかなか一発完動とはなりません。
SPICEの小瓶(6) 電圧源の波形の設定用にPythonスクリプト作成開始
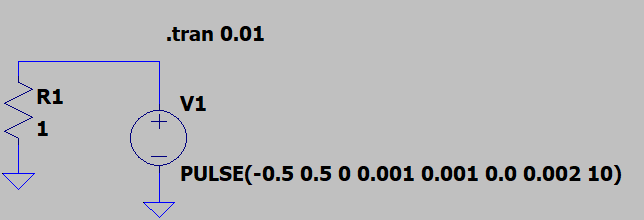
このところLTspiceを使うことが多くなって勝手に不便に思っているのが、独立電圧源の波形の設定です。SPICE自体は細かく時間とか制御できるので機能的にはまったく不満はありません。しかし大枠だけ決めてあとはお任せ、みたいなズボラな設定が欲しいです。そこでズボラな設定用のスクリプトの作成に着手。着手しただけ。まだ機能的には全然。
ブロックを積みながら(62) Node-RED、時間経過で引き金を引く、triggerノード
今回はtriggerノードです。到来したメッセージに対して所定の遅延時間後に別なメッセージを送信することができるもの。人感センサが反応したら3分間だけ点灯するとか、所定時間内にメッセージが到来しなかった場合にタイムアウトを知らせるインターバルタイマ的な使用など、設定次第でいろいろな目的に使えそうなノードです。 “ブロックを積みながら(62) Node-RED、時間経過で引き金を引く、triggerノード” の続きを読む
モダンOSのお砂場(42) Mbed OS6、Mail、allocちょっと気が咎めるけど便利
前回はスレッド間で通信するのにQueueを使ってみましたが、今回は似た「先入れ先出し」の構造でMailです。Mail便利です。こちらを使うとQueueには戻れない?便利なのは、詰め込むデータのためのメモリ領域の割り当て/解放の機能を含んでいるところ。alloc使うと後戻りできまっせん。
MLのお砂場(4) irisデータセットその2、Classification最初の一歩
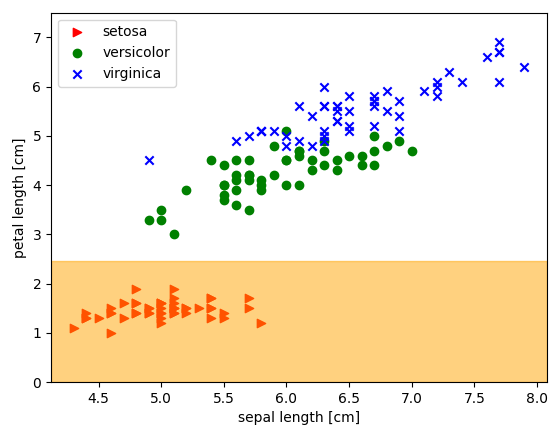
前回に引き続きHello world的データセット iris です。前回はJupyter-labでsklearn内蔵の iris データセットを開き、そのデータ構造を調べました。そしてデータのグラフを1枚描画。今回は、分類の最初の1歩ということで、「見ればわかる」人間的分類をやってみて結果をグラフに残したいと思います。
“MLのお砂場(4) irisデータセットその2、Classification最初の一歩” の続きを読む