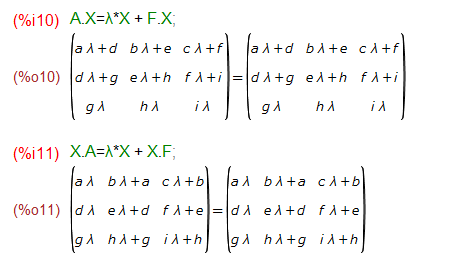
今回はようやく線形代数っぽいところに入りました。でも最初は行列の「くせに」スカラー「みたいに」扱えるスカラー行列です。簡単かと思えば、Maximaの操作、クセが強い気がします。個人の感想です。すみません。反復練習していたら身に付くのか?少なくともまだ全然だな、自分。
忘却の微分方程式(39) 反復練習3、スカラー行列と行列の決定
デバイス作る人>>デバイス使う人>>デバイスおたく
今回はようやく線形代数っぽいところに入りました。でも最初は行列の「くせに」スカラー「みたいに」扱えるスカラー行列です。簡単かと思えば、Maximaの操作、クセが強い気がします。個人の感想です。すみません。反復練習していたら身に付くのか?少なくともまだ全然だな、自分。

シミュレーション時に必ずお世話になるのが独立電圧源じゃないかと思います。「いろいろ設定できる」といいつつ複雑な波形を与えるのはメンドイです。しかしLTspice(日本語)のヘルプを読んでいて気づきましたぞ。.wav形式のファイルを読み取れる。ということはOctaveなどで生成したwaveファイルをspiceできる、と。
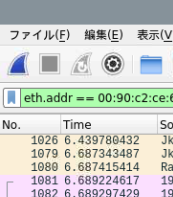
前々回、うさちゃんへPingしてお返事をもらいました。今回はうさちゃんからPingしてみます。通信相手はRaspberry Pi 3 model B+です。うさちゃんからのPingにラズパイからお返事をしながら、その様子を「みんな大好き」Wiresharkで観察してみたいと思います。うさちゃんに書き込むコードはサンプルコードほぼそのままです。
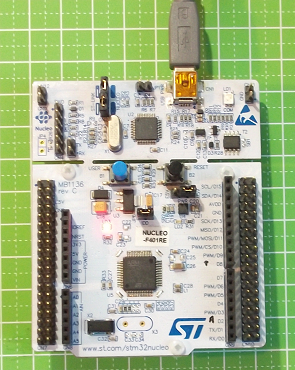
カッコイイ機能があるな、ということで使ってみました。ConditionalVariableであります。確かにカッコイイのですが、ターゲットのSTM32F401REにとっては結構ヤバイ奴でした。シンプルなサンプルコードなのにRAMがいっぱいいっぱいな感じ。何かコードを書けるような余地があるような気がしません。気のせい?
※2022/03/17追記:「気のせい」でした。すみません。OS6はZI Dataとして扱われる部分が多いためにヤバイなどと書いてしまいました。全然ヤバくありません。ヤバイのは自分。
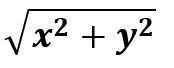
加減乗除に最大/最小、比較とやってきましたが、まだ残っている「演算系の浮動小数点命令」がありました。平方根です、Square Root。平方根を計算するだけでは芸が無いので、2次元のnormも計算してみました。x86(というかx87)系のFPU命令であると「超越関数」までありますが、RISC-Vには超越関数不在です。加減乗除とアルゴリズムで後はよしなに、と。
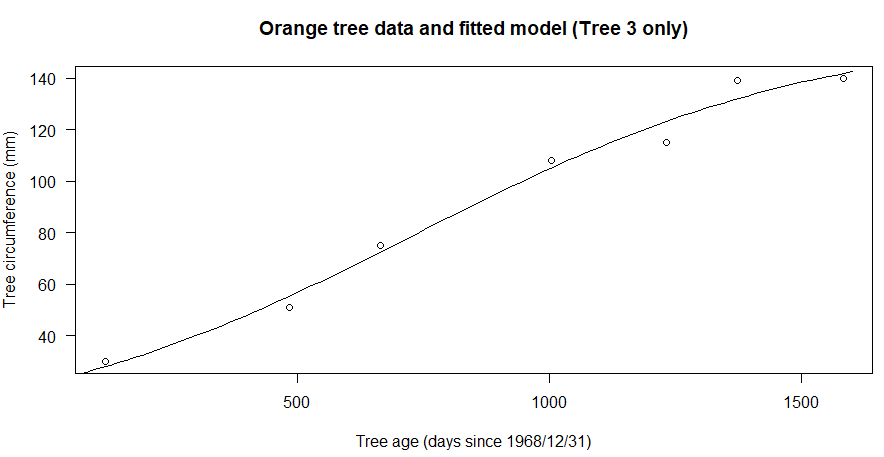
桃栗三年柿八年などと申しますが、このデータを見るとオレンジの木は4~5年くらいでそこそこの太さまで生育するように見えます。しかし、「木の幹の太さを測る」、データの解析以前にいろいろあるようです。米国と日本で測る高さが違う?それどころか日本国内でも北海道と本州以南では違う?いろいろあるのね。

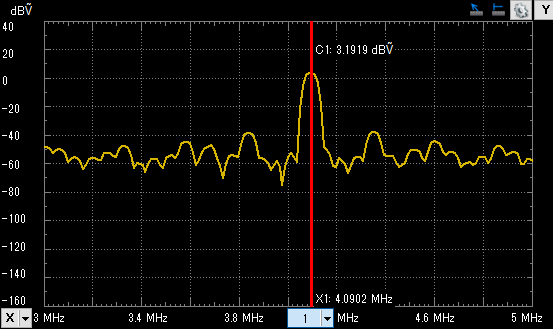
前回は周波数シフタの全貌を実機で観察。今回はその構成要素初段のDCカット・フィルタについて調べてみたいです。フィルタのコードはIIRフィルタを「手習ひ」したときに既に使っていたのですが、忘却の彼方。今回はScilab使ってその特性を調べた後、実機でDCカットフィルタを「外したら」どうなるのか観察してみたいと思います。
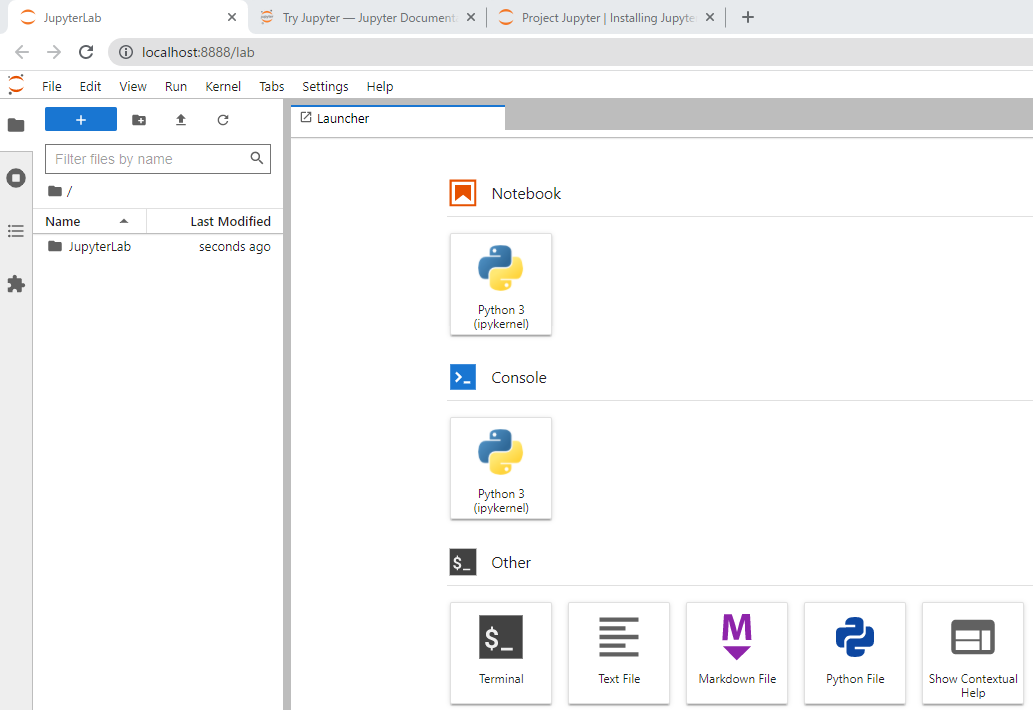
「お砂場」シリーズ第3弾「MLのお砂場」始めることにいたしました。ML=Machine Learningです。MLなのでPythonメインでやる、ということは決めたのですが、Python系の「環境」いろいろありすぎてどうしたものかと考え中です。ポピュラーでお手軽に使えるものから「お砂場」ついでにいろいろ使ってみるかと。
前回PWMで生成したクロックで十分かな~と思ってしまったので、もう一度似たようなことをやるのはカッタるいです。でも自分でPIO(プログラマブルIO)でもクロック作ってみると書いてしまったのでやらないと。大分ラズパイPicoのPIOにも慣れたんですが、PIOアセンブラでたった2行。けれどヘッダ部分書くのがメンドイのよね。
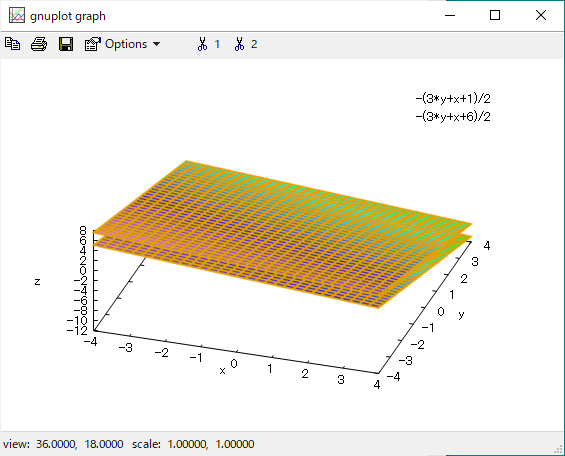
前回の練習、と言って実際に計算しているのはMaxima様ですが、は「ベクトルに垂直な単位ベクトルを求める」でした。今回は「平面と直線の交点の座標を求める」です。霧のかかった朦朧とした頭でもMaxima様にお願いすれば解いてくれる、と。Maxima様は計算間違えなくても入力間違えるなよ、自分。
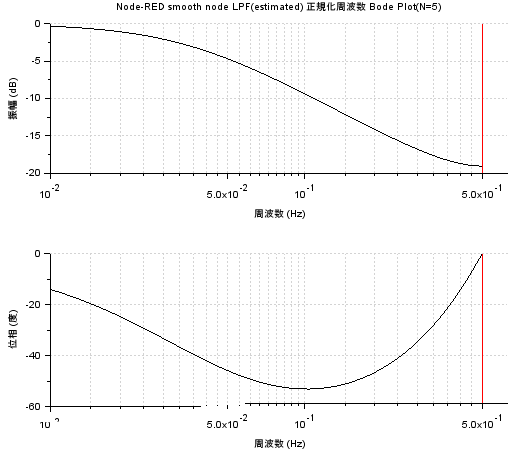
Node-REDはIoTデバイスなどから集めて来たデータをWeb表示したりするときにとても便利なシステムです。昨日別投稿にてsmoothノードというものを勉強。入って来たデータの平均、最大といった統計量を求める他に、ローパス、ハイパスフィルタも含んでました。しかしHELPみてもフィルタ特性については書いてなかったです。
前回は「何もしない」けれど「書けることが多い」commentノードでした。今回は、設定できることは少ない割に奥が深そうな(あまり沼にハマりたくない)smoothノードです。苦手の統計やらデジタル信号処理(もどきですが)も登場。まあ、使ってみている内に慣れる?慣れない?
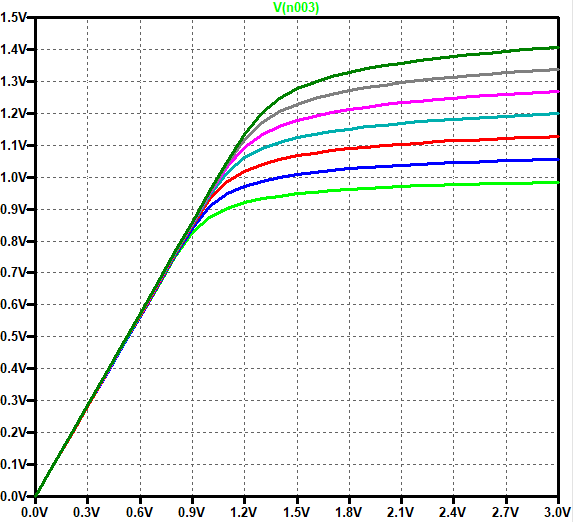
昨日「お手軽ツールで今更学ぶアナログ(81)」で解答編が無いので困っていた件、LTspiceで「やっつけ」てしまうことにいたしました。まあ、SPICEかければお答えは「出る」のですが、理解には程遠いです。ともあれDC解析とパラメータスイープがあればなんとかなる、と。ホントか?
懐かしいZ80的命令を持つ、うさちゃん印のRabbit4000を使用中です。前回「売り」のEthernetから始めてしまい、新マイコン入手時の吉例を飛ばしてしまいました。今回は、Rabbit用の言語処理系 Dynamic Cの特長の一つ、Cooperative Multitaskingを使って「Lチカ」してみます。