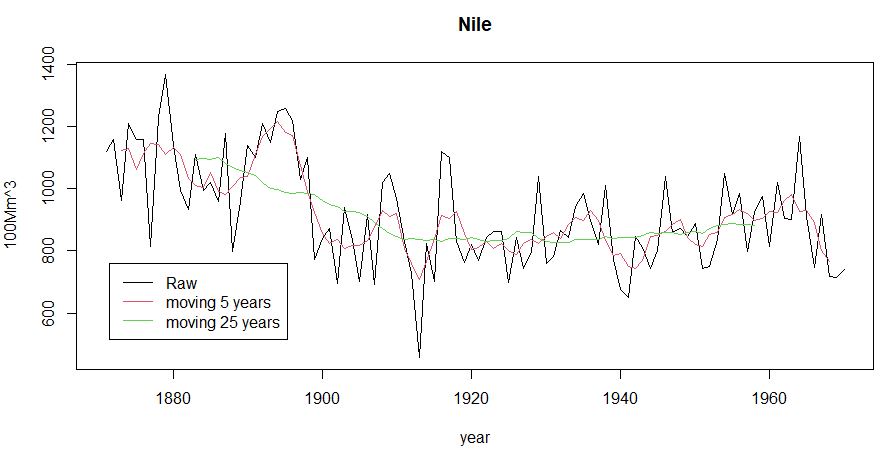
第16回でヒューロン湖の水位変動データを扱ってみましたが、今回はナイル川の水量データです。1871年から1970年までの100年間のものです。その最大水量1370×108立方m/yearとな。エジプト南端のアスワンでの値のようです。そういえば1970年、アスワン・ハイ・ダムの完成の年らしいです。
データのお砂場(19) R言語、Nile、ナイル川の水量百年とな?
デバイス作る人>>デバイス使う人>>デバイスおたく
第16回でヒューロン湖の水位変動データを扱ってみましたが、今回はナイル川の水量データです。1871年から1970年までの100年間のものです。その最大水量1370×108立方m/yearとな。エジプト南端のアスワンでの値のようです。そういえば1970年、アスワン・ハイ・ダムの完成の年らしいです。
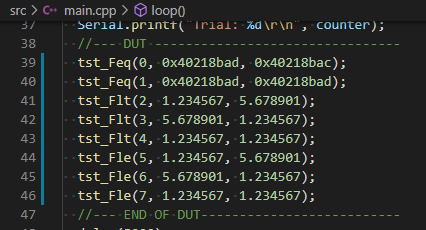
前回は浮動小数点数の最大最小を求める命令でした。今回は、浮動小数点数の比較命令です。比較した結果として条件分岐することが多いと思います。RISC-Vには分岐フラグが存在せず、条件分岐は整数レジスタの中の値を分岐命令で判定します。このため浮動小数の比較命令の結果は整数レジスタに書き込みとなります。
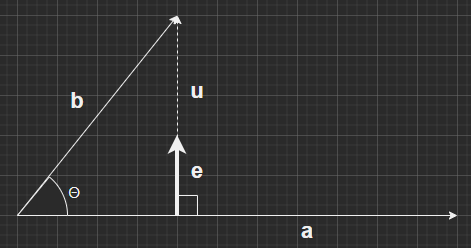
通り一遍舐めていってもMaximaもMathematicaも上手くならないので、ちょっと方針を変更しました。反復練習あるのみ、と。しかし、忘却力のこの年寄りが反復練習してもザル、結局、ファイルに残したものだけが「記憶(ストレージ)」に残ると(計算機におまかせ。)反復練習には大学初年級くらいのところから始めたいです。最初は線形代数とな。
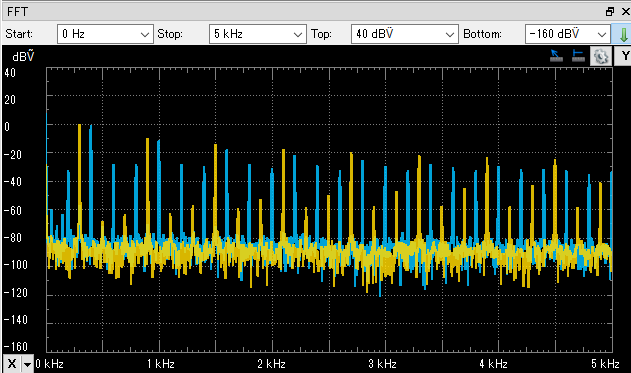
今回から周波数シフタです。周波数をシフトするのに加法定理を使う。それにはcosとsinの両方が要る。cosをπ/2だけ位相シフトすればsinになる、ということで、位相をシフトするために使うのがヒルベルト変換器であります。分かったような分からぬような。今回は先に実機上で動作確認してから個々の部品を調べていきたいと思います。
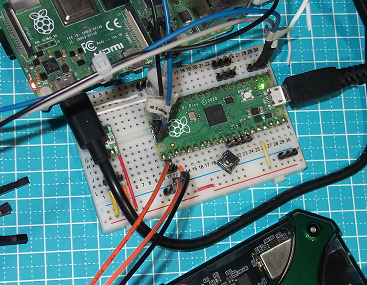
あるデバイスを動かそうとしたら4.096MHzのクロックが必要と書いてありました。手元には4MHzピタリの水晶振動子の在庫はあったと思ったですが、4.096MHzありません。ラズパイPicoで制御するつもりなのだし、ラズパイPicoでクロックから作ってしまえ、という目論見。「普通のマイコン」ならタイマをいじるところですが、ラズパイPicoでは違う、と。
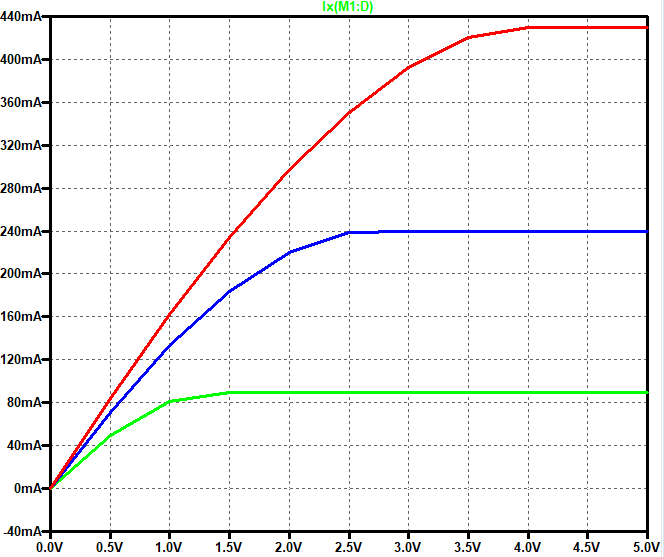
LTspiceのお世話になっている割には使い方が良く分からないままです。最近もアナデバ様の部品キットADALP2000所蔵のMOSFETをLTspiceしてみよ、と。しかしLTspiceには該当部品のMOSモデルパラメータはありませんでした。Webを漁ってSUBCKT定義を見つけたのですが、どう設定するの?
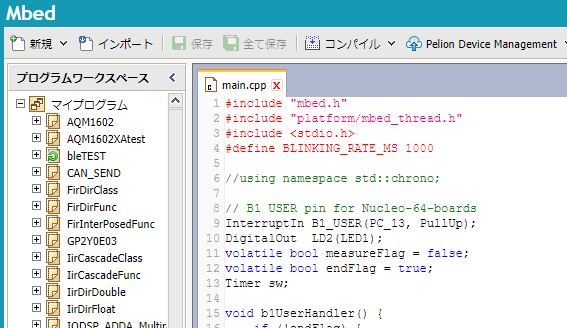
前回がPWM出力だったので、今回は逆に入力インターバルをタイマAPIで測定してみました。入力は割り込み受け、人間がボタンを押す想定なので精度的にはいい加減な方法です。まあ、とりあえずボタンを押す時間間隔は測れたと。また、前回と異なり今回はオブジェクトコードの作成にWebベースのMbed Compilerを使ってみます。

風雲急を告げているのに、ブロックを積んでいるのも何だかな~と思うのですが、この年寄りに出来ることも無いと。。。しかし、思い出すに、大昔、旧東独の半導体屋に言われた一言、「お前ら日本人はロシア人を理解できんだろ」と。正確に言えば「ロシアの半導体屋」という文脈だと思いますが。
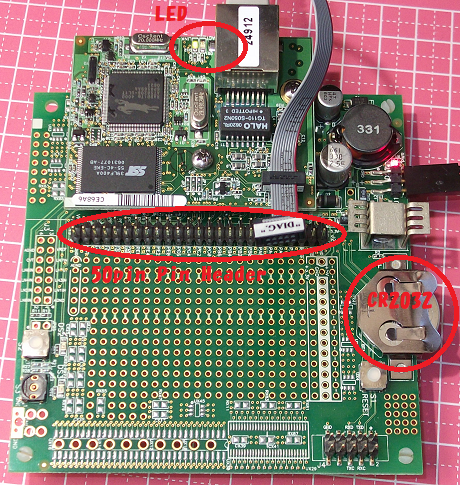
うさちゃん印のRabbit4000、Z80に似た8ビットの命令セットを持つちょっと古いけれども強力なマイコン、を手に入れてインストールをし動作確認をいたしました。今回から、少しづつ「うさちゃん印」を動かしていきたいとおもいます。まずは「売り」の機能Ethernet I/Fの動作確認から。外からPingしてお返事を確認してみます。
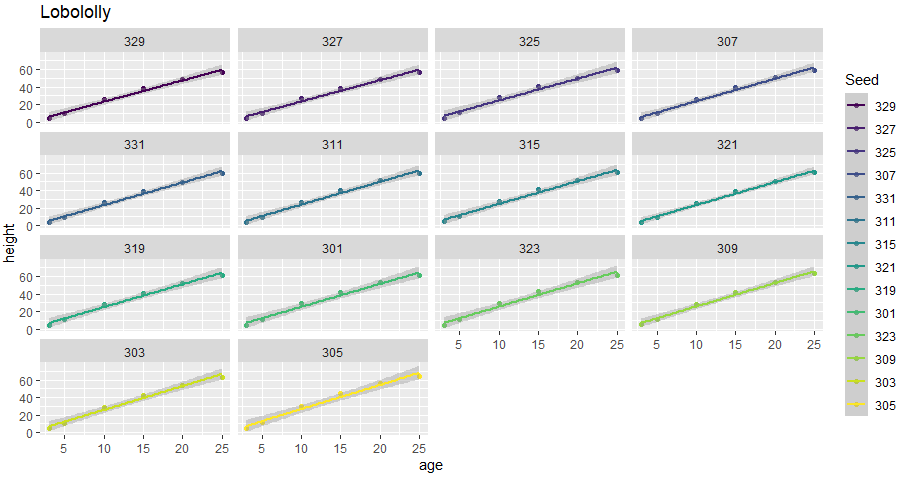
今回登場は米国テキサスからフロリダあたりの湿地帯?のようなところに生えている松の一種みたいです。Lobololly pine tree、またの名をテーダマツとな。R言語の「内蔵」サンプル・データセットをABC順に全部「舐めて」みようなどと思いつかなければ多分お目にかかることは無かった植物であります。
RISC-Vは、RISCの中でもシンプルで「絞り込んだ」命令セットでありますが、浮動小数点数を扱う命令結構多いんじゃないかい。まあ面倒くさいものを扱うので、いたしかたないか。RISC-Vのせいではないですな。前回は積和演算命令でしたが今回は最大、最小求める命令です。
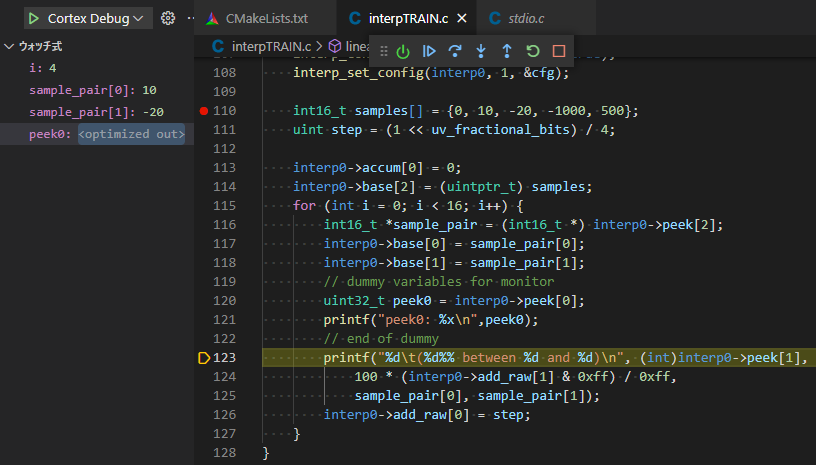
今回は前々回のBlendモード再びです。その上、Datasheetのサンプルプログラムほぼほぼそのままです。何といっても中の人の書いたサンプルプログラム流石すぎます。Blendモードで補間をするついでにデータ配列を舐めるためのポインタアドレスまで作ってました。私のような凡人には考えつかないテクであります。
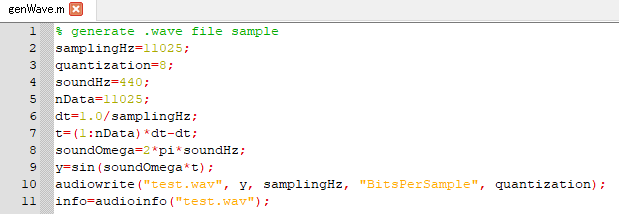
WAVファイルを扱おうとしたらいつの間にかWindowsの標準アプリではそのようなフォーマットは捨て去られていたのにようやく気づきました。お間抜け。自分で音声信号のファイルを生成したりするときには楽なのだWAV形式。単なるPCMだし。ヘッダも簡単。今回はOctaveとC++の両方でWAVファイル書き出しやってみます。
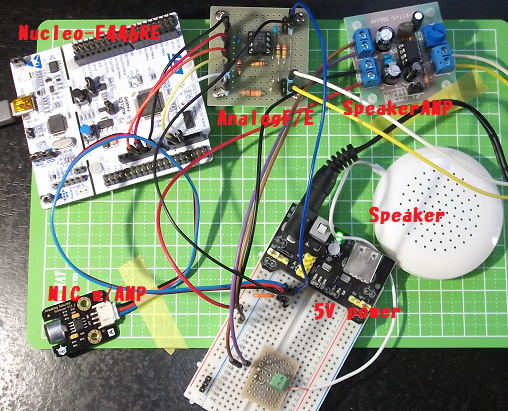
前回アナログ・マイクロフォンを追加、ようやく残響生成器を実際に動かしてみることができるようになりました。スピーカは100円ショップのものを第20回でもつかったスピーカアンプで駆動してみました。確かに残響しています。マイクを叩くと長い地下道でコツコツ歩いているような効果音?つくれました(末尾に音声添付。)