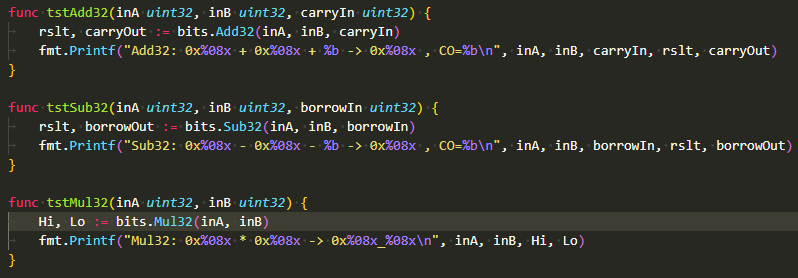
前回は、Goの標準ライブラリmath/bitsの中で、ビット・カウントとかローテイトとかバイナリ者には人気でも、一般ではあまり使われない操作を練習。今回はmath/bitsの残りを練習してみます。キャリー、ボロー付きの加減算、演算の前と後でビット幅が異なる乗算、除算です。アセンブラ書いていたら毎度お馴染みの者ども。
“GoにいればGoに従え(31) math/bitsをTinyGoで使う、その2” の続きを読む
GoにいればGoに従え(31) math/bitsをTinyGoで使う、その2
デバイス作る人>>デバイス使う人>>デバイスおたく
前回は、Goの標準ライブラリmath/bitsの中で、ビット・カウントとかローテイトとかバイナリ者には人気でも、一般ではあまり使われない操作を練習。今回はmath/bitsの残りを練習してみます。キャリー、ボロー付きの加減算、演算の前と後でビット幅が異なる乗算、除算です。アセンブラ書いていたら毎度お馴染みの者ども。
“GoにいればGoに従え(31) math/bitsをTinyGoで使う、その2” の続きを読む
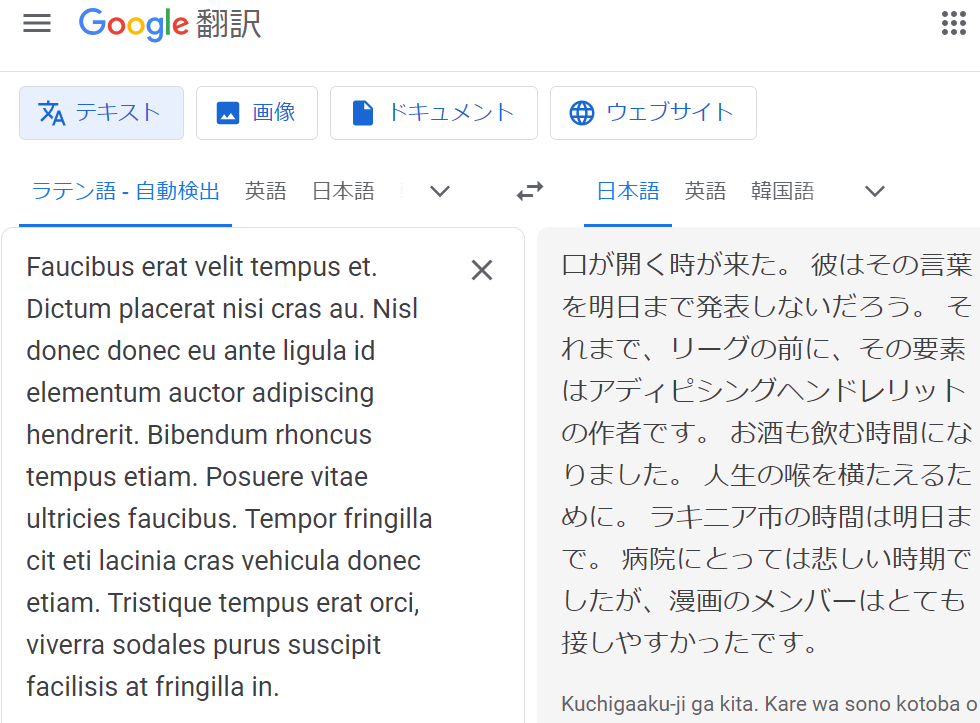
前回 bar-chart-dataノードを試用。テスト用のサンプルデータを作るのがメンドいデス。テストデータをホイホイ作ってくれるものがないかしら?と思ったらいくつか発見。今回はそのうちの一つnode-red-node-data-generatorノードを試用。なんと”Lorem Ipsum”も呟いてくれるのね。。。
“ブロックを積みながら(128) Node-RED、data-generatorノードの試用” の続きを読む
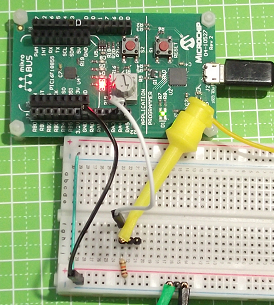
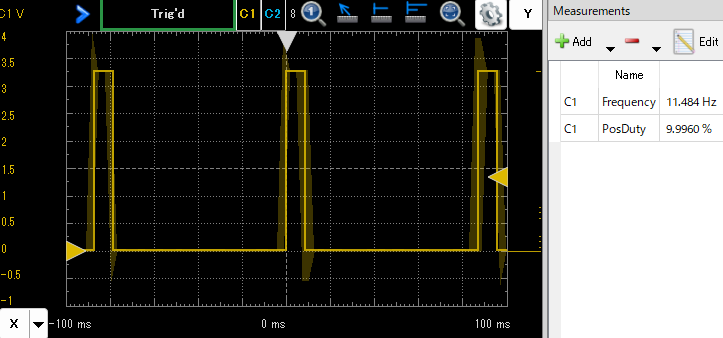
前回は参照電圧を生成してくれるFVRを使ってみました。PICマイコンの良いところはハード搭載がなければ外付けになってしまう「お役立ち」回路がいろいろ搭載されており、かつその設定がソフトウエアでできるところじゃないかと思います。今回使ってみるのはNCO(数値制御発振器)です。お好みのクロックを生成できるもの。 “PIC三昧(10) NCO(数値制御発振器)を使ってみる、PIC16F18855” の続きを読む
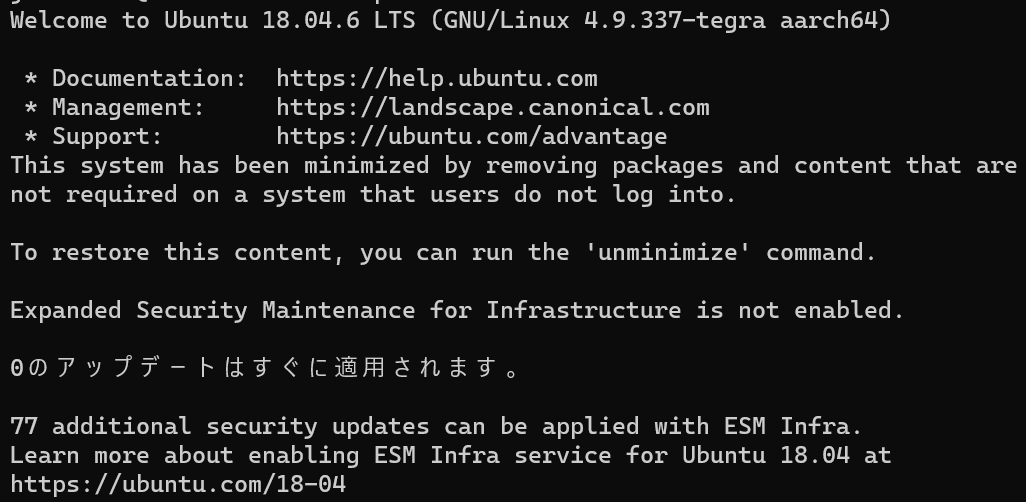
前回、intelの内蔵GPU搭載機上で OpenCL をWSL2環境とMSYS2環境から使えるように環境整備。しかしこれは Jetson Nano のCuda環境がホコリを被っていたためでした。今回Jetson Nanoの復活に取り組み。復活したのはよいけれど、その際OSアップグレードしようとしてハマリましたです。
“やっつけな日常(54) Jetson Nanoの復活とOSアップグレードの失敗” の続きを読む
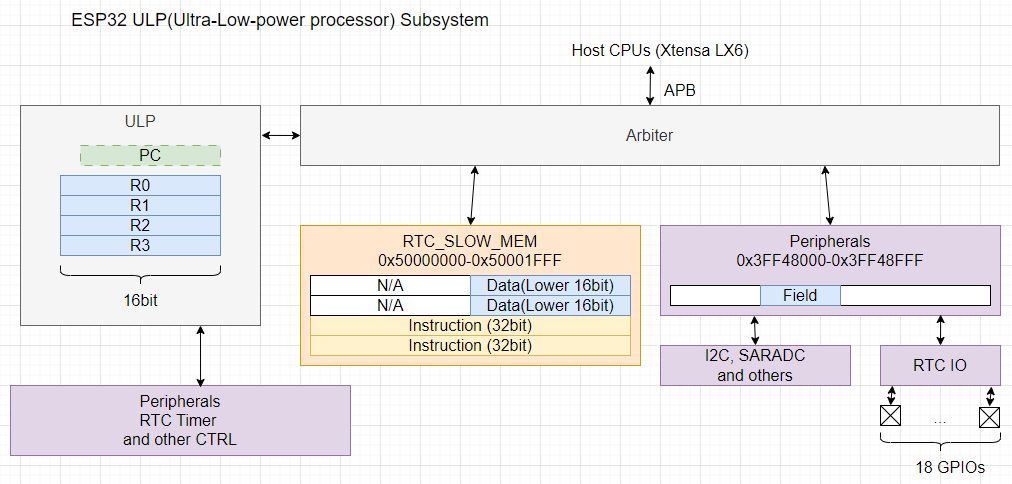
前回PyPIからESP32版MicroPythonで動作するULP開発環境をダウンロード、ターゲットのESP32 DevKitC機にインストールしました。ULPこそはESP32(Xtansaコア機)が搭載する「3つめの」プロセッサ・コアであります。メインのコアがお休みしているときにも密に動作する影の存在。結構強力。
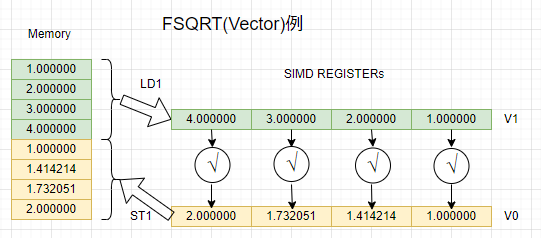
前回、前々回とA64のSIMD命令のうちソースオペランドを2つ取る演算命令の2タイプを練習しました。今回はソースオペランドを一つだけとる演算命令の代表選手?FSQRTです。前にもそんなこと書いた気がするな。デジャヴか記憶の混濁か?SIMD命令はとっても数が多いので「各パターン」せめて一種類くらいは練習しておこうと。 “ぐだぐだ低レベルプログラミング(129)ARM64(AArach64)FSQRT(ベクトル)” の続きを読む
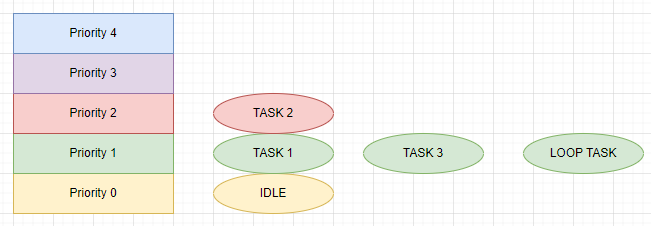
前回はDelayに関するAPIでした。今回はTaskのPriorityを操作してみます。今までPriorityはみんな「1」みたいなテキトーな設定をしてきました。優先順位を設定する実験してみることで勉強になるんでないかい、という目論見。しかし、改めて FreeRTOSConfig.h を読んでみると思っていたのと違う?
“モダンOSのお砂場(68) UNO R4、ルネサスRA4M1でFreeRTOS、優先順位” の続きを読む
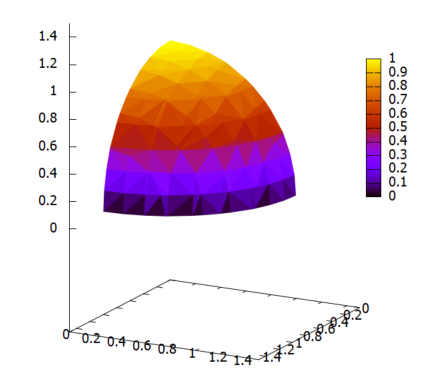
前回までは2重積分で変数変換を練習してきましたが、今回は3重積分での変数変換です。積分領域を確かめ、ヤコビアンさんを計算して、積分変数を変換した積分を行うという手順は2重積分のときと変わりませぬ。しかし、変数が増えるとぐっとメンドくなるのよ。でもMaxima様にお願いする分には2個も3個も関係ね~と。
前回書いたとおり、WCHのRISC-V搭載マイコンCH32Vは、STM32をリスペクトしているのか、HALレイヤの関数がクリソツです。先にSTM32のHALレイヤで予習しておいたらCH32VでHALレイヤを使うのも楽なんでないかと。学習教材としてはタイマからPWM出力するのをHALレベルでやってみようと。メンドイけど。 “小ピンマイコンの酷暑(5) CH32Vのモデル?STM32のHALレイヤの使用 その2” の続きを読む
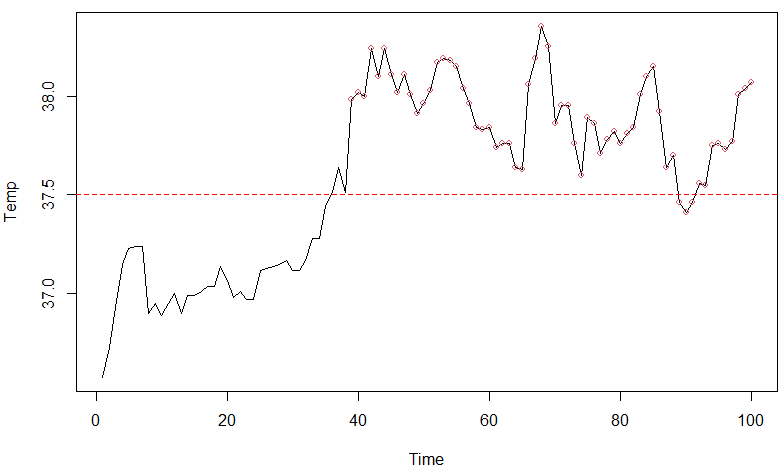
今回のサンプルデータセットはbootパッケージのbeaverです。忘却力の年寄なので定かではありませんが、どこかで見た気がします。デジャヴ?記憶は定かでなくても記事のindexをたどれば発見。datasetsパッケージのbeaversデータセットがビンゴであります。結論からいうと部分一致だけれども形式が違いました。 “データのお砂場(96) R言語、beaver、デジャヴ?どこかでみた? bootパッケージ” の続きを読む
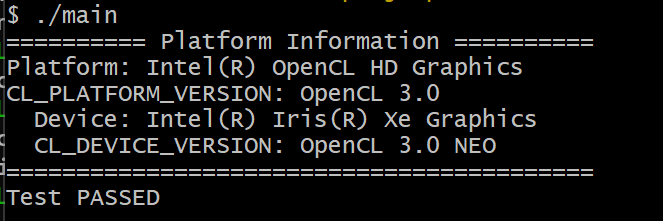
先日古い友達からGPUについて質問あり。年寄はGPU素人なのに語ってしまったデス、無責任。それもあり、GPGPUプログラミング再開すべしと。質問はNVIDIAだったのだけれど眠っているJetsonの再開には物理障壁あり、そこでパソコン上でIntel GPUを試みるべしと。先達の皆さまのお陰により開始するのは簡単。
“やっつけな日常(53) 先達のお導き:WSL2とMSYS2からOpenCLを使用可とする。” の続きを読む
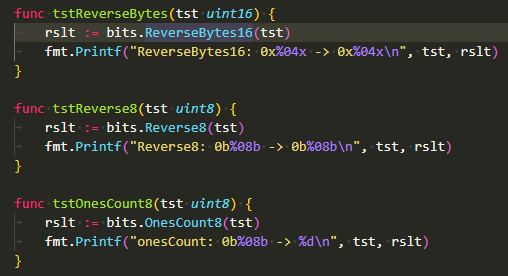
前回まで標準ライブラリのcontainerを練習してましたが、今回からmathに入ります。最初はmath/bitsです。ここにはMCU(マイクロ・コントローラ・ユニット、間違えてもマーベルなんたらではありませんぞ)使うときに必要になりそうな者どもが控えております。バイナリ者(忍者の一種?)にはお馴染みの操作かと。 “GoにいればGoに従え(30) math/bitsをTinyGoで使ってみる” の続きを読む
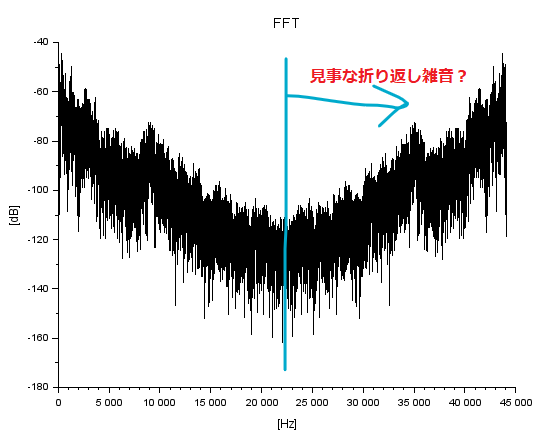
過去回のRTLSDRからデータ輸入では復調するためにダウンサンプリングに取り組み?ました。今回はアップサンプリングに使えるScilab関数を勉強してみます。実験ターゲットに使うのは前回解析プロットにかけた音声データです。アップサンプリング(インターポレーション)した結果、どうなってしまうのか?意外なような当然なような。
“手習ひデジタル信号処理(98) Scilab、アップサンプリングする方法3つのつもりが。” の続きを読む
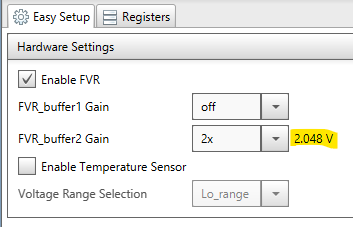
前回は内蔵アナログコンパレータを使って外部電圧2つを比較してみました。今回はアナログコンパレータの入力電圧の一方を内蔵のFVR(FIXED VOLTAGE REFERENCE)としてみます。ありがちな1.024Vとその2倍、4倍の電圧が内部のADC、DACそしてコンパレータで参照できるようになってます。便利。
“PIC三昧(9) FVR(固定参照電圧源)を使ってみる、PIC16F18855” の続きを読む