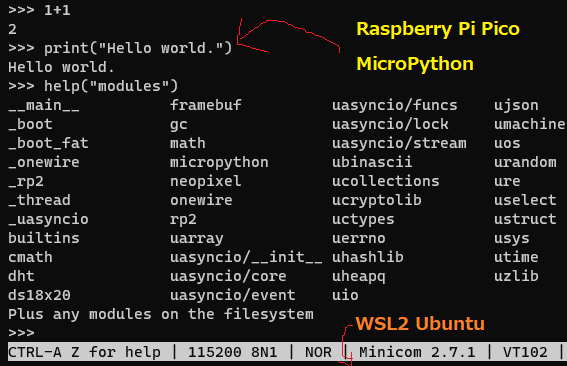
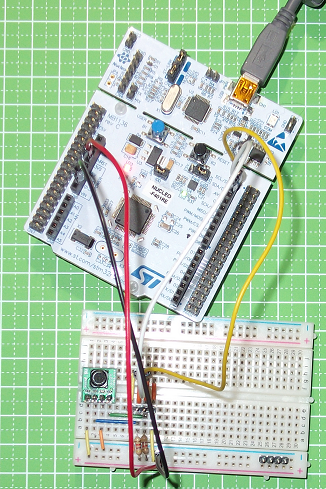
MicroPython、ソースからのビルド・シリーズも4回目。ラズパイPico用、Raspberry Pi 4用、SAMD21用とやってきて、今回はST Microelectronics社 STM32マイコン用です。ターゲットボードはNucleo F401RE。ビルド簡単、書き込み簡単。調子乗ってんじゃねえよ、自分。
“MicroPython的午睡(77) STM32版MicroPython、WSL2でビルド” の続きを読む
MicroPython的午睡(77) STM32版MicroPython、WSL2でビルド