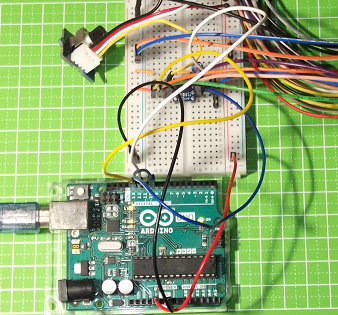
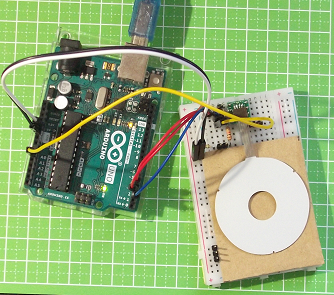
昨日「アナログ」の別件記事で、ADコンバータAD7920を単体動作させてみました。アナログねたの続きだったので単体でしたが、本来はマイコン等SPIインタフェースを持つデバイスに接続して使用するチップです。今回は、昨日結線したAD7920搭載のブレッドボードをArdunio Unoに接続してみます。
IoT何をいまさら(107) SPI接続のADC、AD7920をArduinoで制御してみる
デバイス作る人>>デバイス使う人>>デバイスおたく
昨日「アナログ」の別件記事で、ADコンバータAD7920を単体動作させてみました。アナログねたの続きだったので単体でしたが、本来はマイコン等SPIインタフェースを持つデバイスに接続して使用するチップです。今回は、昨日結線したAD7920搭載のブレッドボードをArdunio Unoに接続してみます。
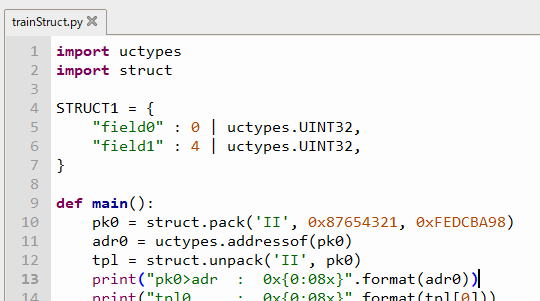
前回、前々回とuctypesモジュールを使ってCの「構造体」的なものにアクセスしてみました。しかしMicroPythonには、その名もズバリのstructモジュールがあるのです。こちらはCの「構造体」的なものにパックしたりアンパックしたりできるもの。「似たもの同士」だから、相互に運用可能じゃないかい?やってみました。 “MicroPython的午睡(70) ラズパイPico、uctypesとstruct” の続きを読む

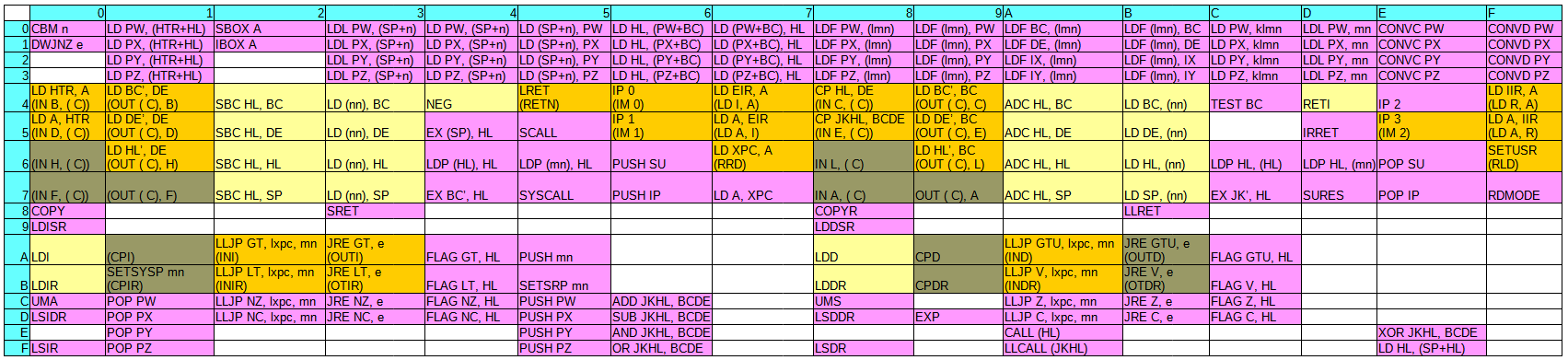
最強?のZ80後継機、Rabbit4000のオペコードマップを見てきましたが、ようやく完結です。今回はオペコードの第1バイトが0x6Dで始まるRabbit4000独自命令の面です。この面は「しがらみ」が無い分うさちゃんの「意思」がありあり。この面の全命令のニーモニックはLDなのですが、実は転送だけでもない、と。 “うさちゃんと一緒(22) Z80の魔改造? Rabbit4000のオペコードマップその4” の続きを読む
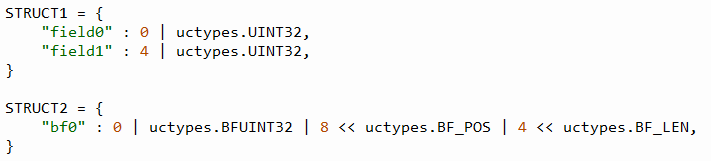
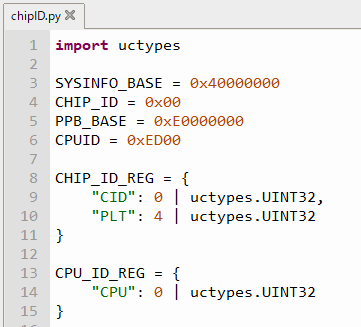
前回はMicroPythonのuctypesモジュールを使って、ラズパイPicoのCPUレジスタを直接読んでみました。しかし読み取りだけ、書き込みもビットフィールド・アクセスもやってないです。直接IO制御するなら練習しておかないと。今回はメモリ上のバイトアレイを練習相手に書き込みとビットフィールド操作をやってみます。
“MicroPython的午睡(69) ラズパイPico、構造体アクセス、ビットフィールド含む” の続きを読む
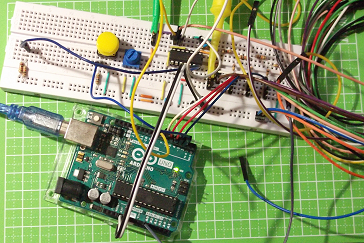
別シリーズでSAR型ADCの原理回路の実験をしました。しかしアナログ部分のみ、SAR(逐次比較)らしいデジタルの2分検索のステートマシンは実装せず、「また後で」などと書いてました。そこで今回はArduinoを使って「2分検索部分」をプログラムしてステートマシンで制御できそ~(でも不安あり)なところをやってみます。
別シリーズでリング型の「タッチパッド」センサを入手。圧力の変化を抵抗の変化に変換するタイプの素子です。薄いドーナツ型形状なので、指でぐるぐる回したりする操作を検出するのに向いてそうです。しかし別シリーズでは手動で動作確認したのみ。マイコンで動かしてみないと。そーゆー時にお楽なのが伝統のArduinoであります。 “IoT何をいまさら(105) MicroNavRingセンサをArduinoに接続してみる” の続きを読む
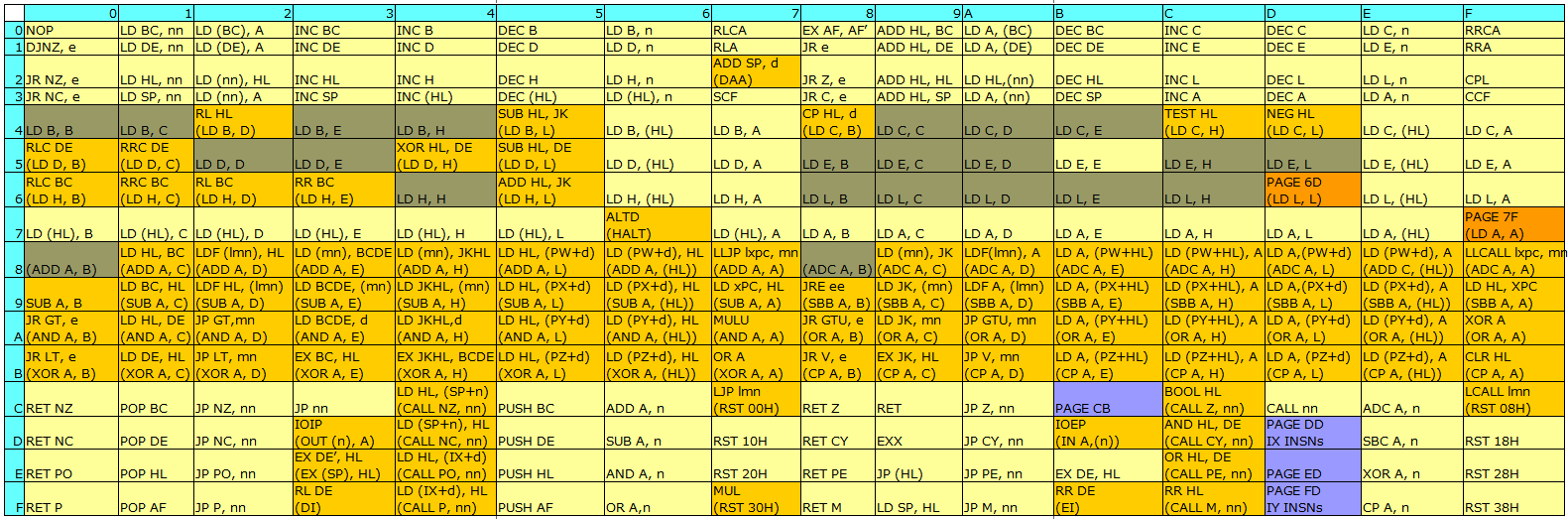
最強(最恐)のZ80後継機、Rabbit4000のオペコードマップを前々回、前回とみてきた3回目です。今回は、オペコードの第1バイトが0xEDで始まるZ80の拡張命令(i8080に対しての拡張)面です。第1バイトでは命令の移転先を作ったりして殊勝なうさちゃんもED面では手厳しいです。自由自在どころが傍若無人な勢い。 “うさちゃんと一緒(21) Z80の魔改造?Rabbit4000のオペコードマップその3” の続きを読む
前回記事から約4か月もMicroPythonご無沙汰です。別処理系に手を伸ばしたせいで棚上げ状態。これではイケナイということでMicroPython再開でございます。しかし忘却力です。どうやってMicroPythonしたらよかったんだけ?まずはターゲットになるボードを取り出さないと。。。ラズパイPicoであります。 “MicroPython的午睡(68) ラズパイPico、IOレジスタへの直接アクセス” の続きを読む

前回は、Rabbit4000の、Z80「魔改造」第1バイトのオペコードマップを眺めてみました。しかしZ80にはDD、FDなどの第1バイトによって「拡張」されるオペコードマップも存在します。Rabbit4000の場合、DD,FD系も期待に違わぬ大拡張です。ただしここではZ80の元の命令には手は加えてません。
Rabbitシリーズ(販売元Digi社)のプロセッサはZ80「オマージュ」製品といっていいでしょう。しかし、Z80の盲腸化した仕様をチマチマ活用して拡張していた3000シリーズまでと比べると、4000シリーズ以降では大胆に拡張してます。そのレベル、もはや魔改造。Z80大好きな「中の人」が好き勝手やり放題でなかったかと。 “うさちゃんと一緒(19) Z80の魔改造?Rabbit4000のオペコードマップ その1” の続きを読む
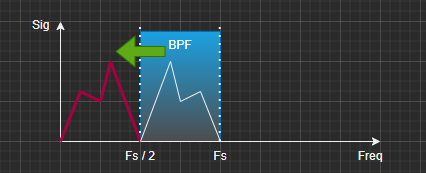
前回、三上先生のサンプルプログラムで、甲子園中継が受信できたと喜びました。しかし1点疑問あり。サンプリング周波数は900kHz(ナイキスト周波数は450kHz)なのに、受信したNHK第1放送(東京)は594kHzです。なぜ受信できるの?ここで登場するのがアンダーサンプリングとBPF(バンド・パスフィルタ)です。 “手習ひデジタル信号処理(50) SDR、アンダーサンプリング、ナイキスト周波数より高い信号” の続きを読む
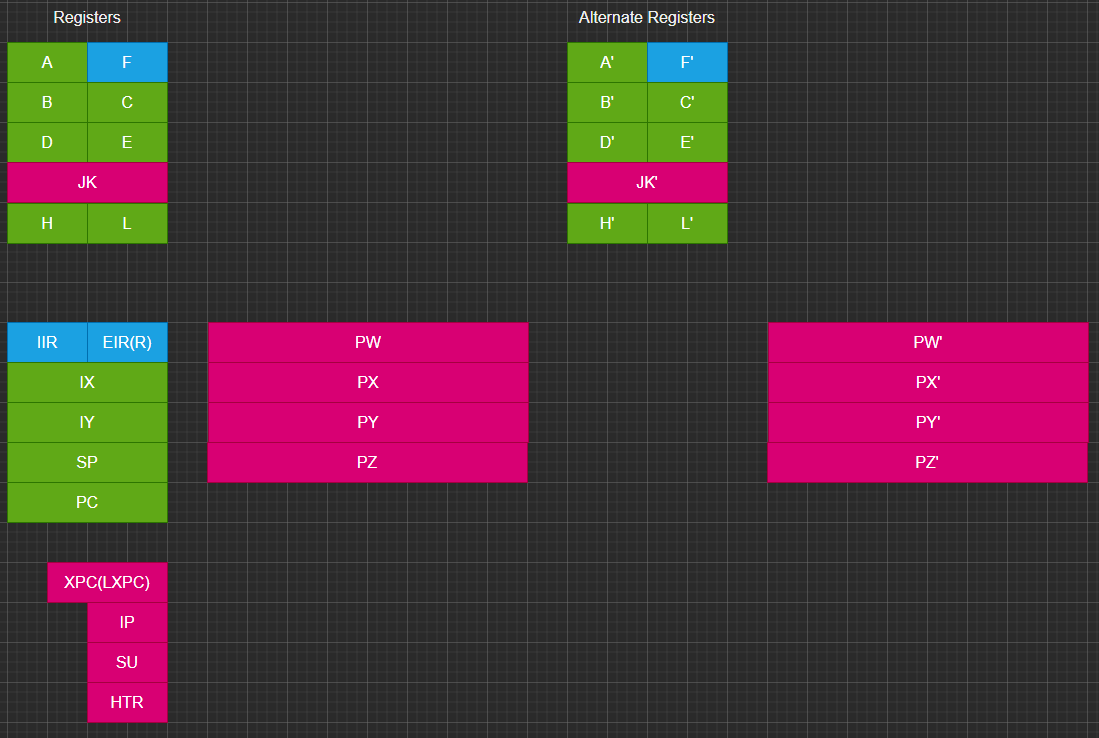
うさちゃんRabbit4000のDynamic Cのライブラリを読んでいるとインライン・アセンブラ・コードに迷いこみます。RabbitシリーズはZ80愛に溢れているCPU、Z80上位互換です。Z80のつもりで大体読めますが、時々「知らない」レジスタなどに遭遇します。今回はCPUレジスタを図にまとめてみました。
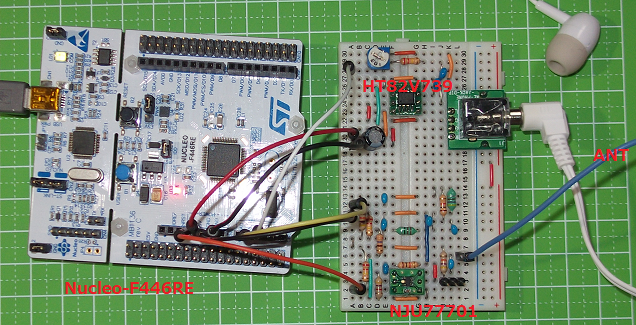
前回までに、Arm Cortex-M4コアのSTM32F446マイコンでの「ダイレクト・サンプリングSDR実験」用フロントエンド回路が出来上がりました。これからSDRのお勉強に入りますが、初回は早速AMラジオを受信してみます。なんたって三上先生のサンプルプログラムのバイナリがあるので、書き込めば動く筈。
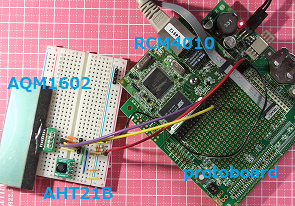
前回は、Rabbit4000(モジュールはRCM4010)のオープンドレインで使用可能なピンを見つけて、16文字x2行のキャラクタディスプレイAQM1602をソフトI2C接続いたしました。今回は同じ「I2C」バスにAHT21B温湿度センサを取り付けてみます。今回はライトオンリの前回とは違って読み書き双方向が必要です。