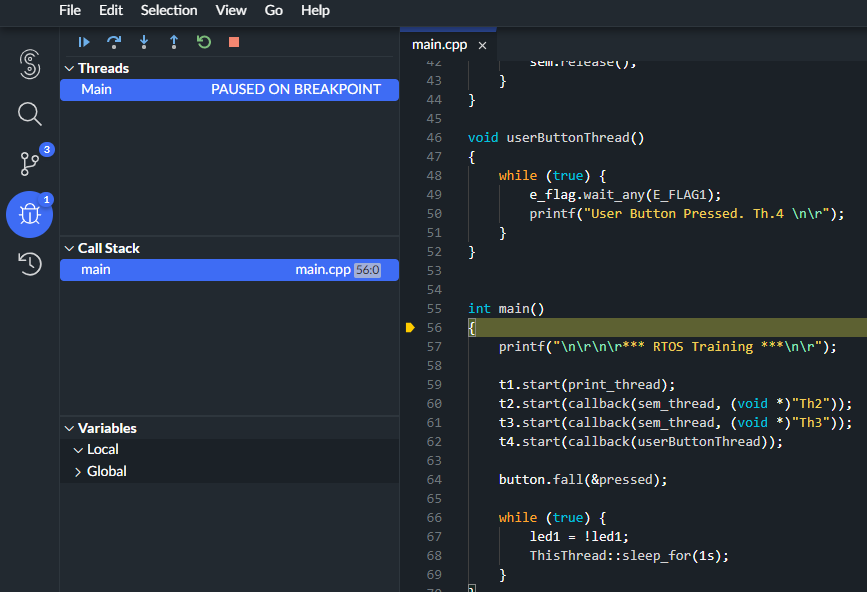
前回、Arm社Mbed Online Compilerから Keil Studio Cloud への移行を開始。Mbed Online Compiler上のプロジェクト複数の移行を行ってみましたが、成功も失敗もあり。今回は失敗原因を追究してビルド成功させたいです。またWeb環境からのデバッグについても試みてみます。
鳥なき里のマイコン屋(159) Keil Studio Cloudへの移行、TIPS?
デバイス作る人>>デバイス使う人>>デバイスおたく
前回、Arm社Mbed Online Compilerから Keil Studio Cloud への移行を開始。Mbed Online Compiler上のプロジェクト複数の移行を行ってみましたが、成功も失敗もあり。今回は失敗原因を追究してビルド成功させたいです。またWeb環境からのデバッグについても試みてみます。
前回、Rabbit4000のGPIOポート合計40ビットのうち特定の目的に使用可能なポートは以外と少ないことが分かりました。その後Dynamic CのI2C用サンプルプログラムを調べたところ「手元のRCM4010+プロトタイプボード」では使用不可、という結論にいたりました。仕方が無いので自分で「サンプル」書きます。
インストールせずに(また無料で)Arm用のオブジェクトを生成できるArm社Mbed Online Compilerにはお世話になっております。しかし環境の移行を促すメッセージが表示されるようになってまいりました。移行先は Keil Studio Cloudです。機能拡張は良いのですが今までのソースの移行は大丈夫か?
前回までのように、うさちゃんRabbit4000をイーサネット経由で動かしている分には、手足のGPIO端子などは気にする必要はありません。でもそろそろマイコンらしい仕事をさせたいです。勿論、http経由でですが。しかし、うさちゃんのIO端子について全く分かってないことが発覚。大慌てで調べましたです。
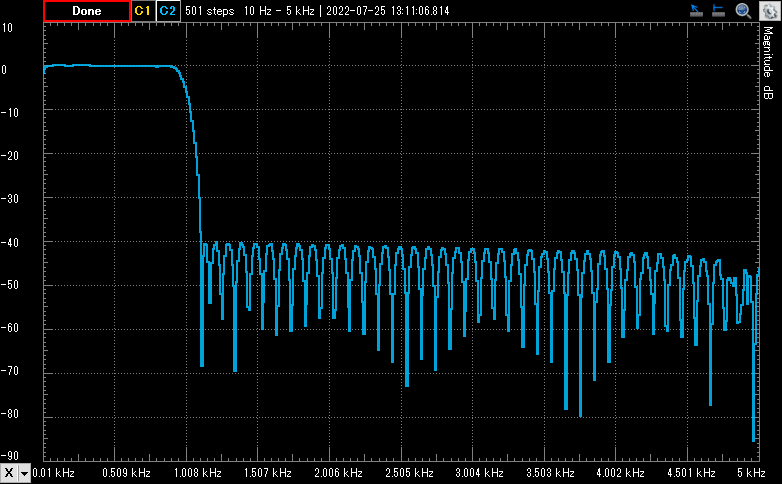
今回はFFT使ったFIRフィルタです。以前に「普通に時間領域」でFIRフィルタしていたもの。今回は、入力信号もフィルタ係数もFFTをかけて周波数領域で乗算してから、逆FFTで時間領域の信号に戻すのだ、と。無限の長さの入出力信号を小分けにするためには重複保持法使うんだとか。しかしオンラインコンパイラの件気になるのデス。
前回は動的なWebページの最初ということでSSIでした。SSI利用時にもCGIハンドラにあたるべきものは動いていたのですが断片的でした。今回はWebページ全体を動的に生成できるように、「うさちゃん」式のCGIハンドラ記述のお作法を学んでいきたいと思います。マニュアル読んでサンプル読んでようやく少しわかった?知らんけど。
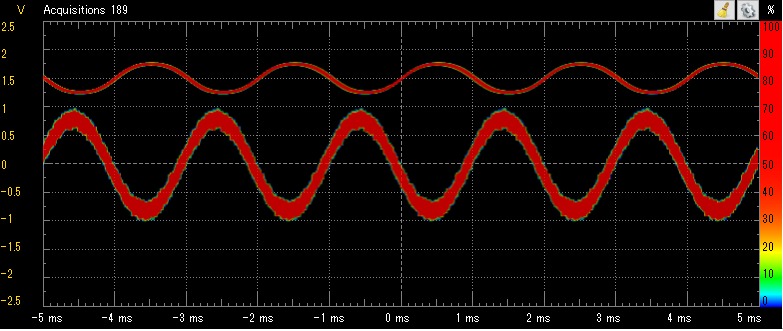
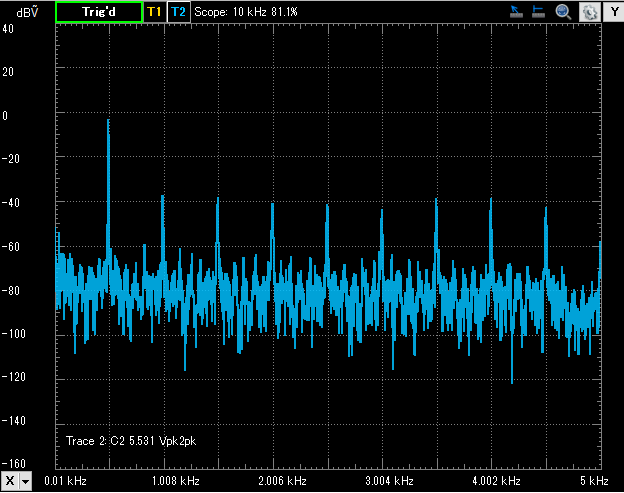
前回、前々回と適応線スペクトル強調器のサンプルプログラムを動かしていて「波形が不安定」とか「ステップ・サイズ・パラメータも安定せんな~」と気にかかっておったのです。その原因として心に引っかかっていたのが入力波形です。ノイズを「盛る」べく制限波に乱数を重ねているのですが、強調器のナイキスト周波数越えのノイズまで山盛り。
“手習ひデジタル信号処理(45) 適応線スペクトル強調器、実験用入力信号フィルタしたら見違えた” の続きを読む
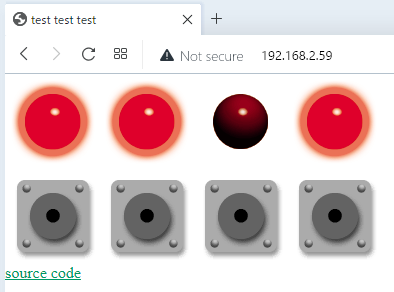
前回は、静的なコンテンツのみのHTMLサーバの作り方を調べました。しかし、うさちゃん(Rabbit 4000)をHTTPサーバにしたいのは、何かマイコンらしい処理をしてもらったものにWebページとしてアクセスしたいからです。動的なページ必須です。今回は動的ページでもっとも簡単そうなSSIでやってみます。 “うさちゃんと一緒(13) 動的なWebページ最初の一歩、SHTMLでSSI” の続きを読む

前回、適応フィルタの応用とてALE(Adaptive Line Enhancer)、適応線スペクトル強調器なるものを動かしてみました。まあサンプルプログラムを動かしてみるだけなら簡単っと。今回はさらに「学習同定法」というものが登場し、信号の大きさに応じてパラメータを変化させるのだ、と。ううむ、どんどんムツカシクなっている気がするのだけれど。。。やるしかない。
ALEというと、私の心の中では40年以上前から不動のAddress Latch Enableであります。しかし今回は、Adaptive Line Enhancer、適応線スペクトル強調器なんであります。適応フィルタの応用であります。信号処理素人の私にとっては適応と聞いただけで恐れいってしまうのですが。大丈夫か。
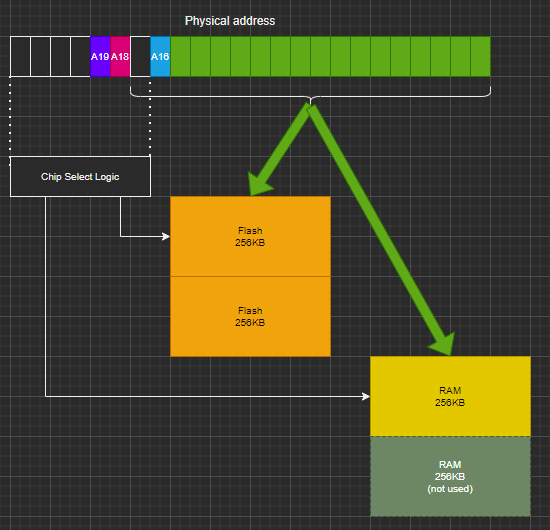
前回、Rabbit4000のメモリマップと称するものを掲げつつ、本人も釈然としておりませんでした。今回、実機に「問いかけつつ」分かってきたのが、Rabbit4000のチップセレクトロジックが果たす役割です。物理アドレスのその先にもう一段階の対応関係がアリーの。うさちゃん、思ったよりももっと複雑。 “うさちゃんと一緒(11) Rabbit4000(RCM4010)のチップセレクトロジック” の続きを読む
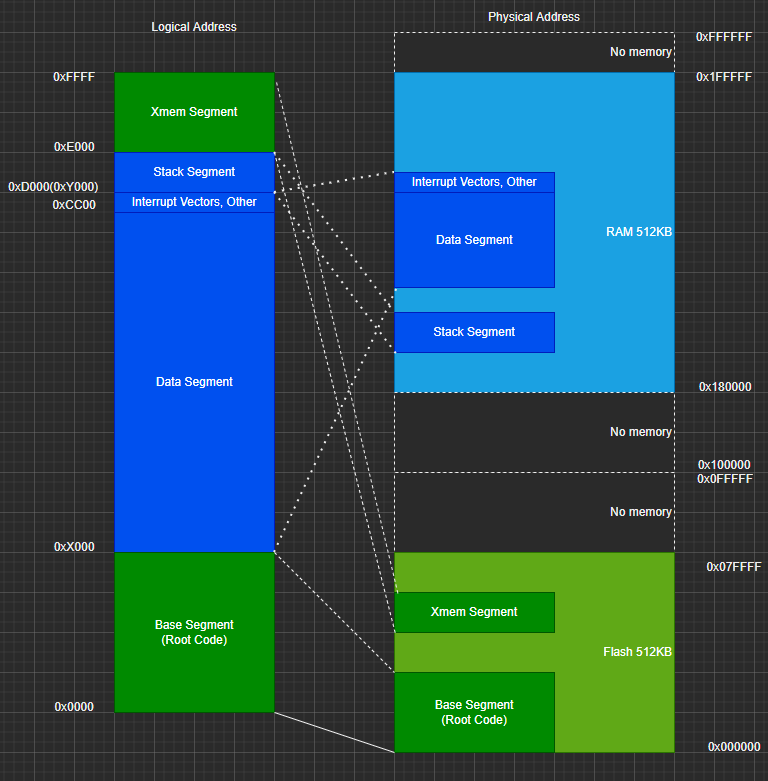
うさちゃんRabbit4000(モジュール型番としてはRCM4010)でプログラムを書いていくにあたって、知らん事が多いなと痛感いたしました。その一番はメモリの構成です。Z80的16ビット論理アドレスから24ビットの物理アドレスに拡張しているRabbit4000の仕組みをまず知ろうと。ううむ、調べてみるといろいろ複雑。
Z80上位互換のCPUは数あれど、うさちゃん印のRabbitはEthernetインタフェースまで搭載した強力なものであります(コマケーことを言うと完全な上位互換ではないようです。)ともあれ8ビットのZ80の64kバイトのメモリ空間の制約をバンクスイッチ的なハードで大拡張しているところは他の拡張CPU同様かもしれません。