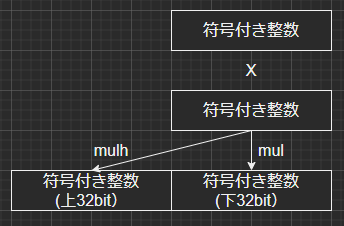
前回は、RISC-Vの乗算命令と除算命令を1命令づつ動かしてみました。今回は 乗算命令 の全貌を見てみます。といっても4命令ですが。実装がシンプルになるように考慮した結果でしょうが、命令の使用方法はクセが強い、気がします(個人の感想です。)それにnucleriのツールチェーンにも制限が?
ぐだぐだ低レベルプログラミング(39) RISC-V、mul、RV32M拡張その2
デバイス作る人>>デバイス使う人>>デバイスおたく
前回は、RISC-Vの乗算命令と除算命令を1命令づつ動かしてみました。今回は 乗算命令 の全貌を見てみます。といっても4命令ですが。実装がシンプルになるように考慮した結果でしょうが、命令の使用方法はクセが強い、気がします(個人の感想です。)それにnucleriのツールチェーンにも制限が?
ESP-EYE使いESP-IDF環境でLチカをプログラムするのを「敷居が高い」などといってMicroPythonに逃げてしまいました。そのままでは進歩がないので、手足があって分かり易いESP32-DevkitCにもどってESP-IDF環境でLチカしてみました。素のままではモダンOSにならないので、FreeRTOS機能を使う縛りでです。
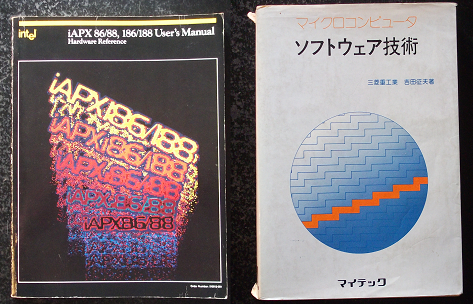
今回は2冊同時です。アイキャッチ画像左は、インテルの iAPX86,88,186 and 188 User’s Manual、1983年。右は「マイクロコンピュータ ソフトウエア技術」吉田著、マイテック 1979年です。前回16bit話だったので、今回は時代を遡って8ビットから16ビットへの移行期について。
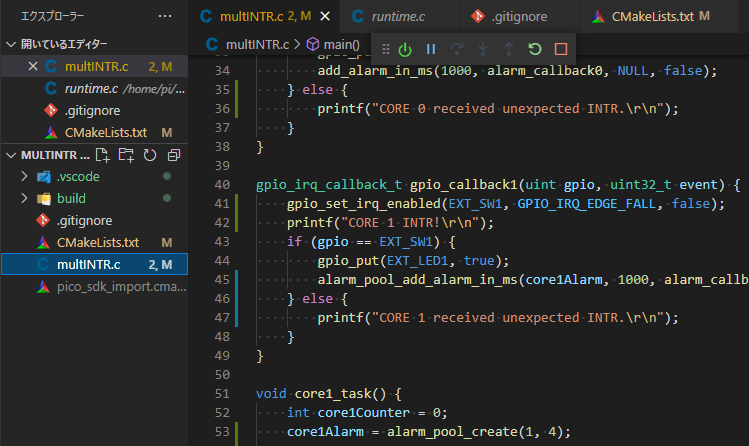
前回、マルチコアの両方にGPIO割り込みを入れてみましたが、割り込み受付後のタイマ処理が上手く行きませんでした。暫定対策したものの、実はそれもダメダメでした。今回はタイマ処理が上手く行かなかった理由を調査。対策打って「安定して動いている」ように「今のところ」見えているところまでやってみました。継続試験中。
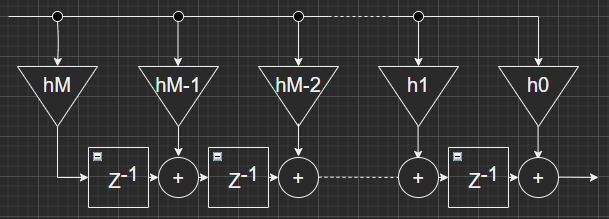
前回はFIRフィルタ「直接形」ということでその結果にちょっと感動。今回は同じことを「転置形」でやれ、との思し召しです。いくら感動の結果でも同じ筈。「カッタリ~」などと不埒な事を言っていては修行になりませんぞ(手習ひか。)前回のプログラムを書きなおし、F446に書き込んで実験いたしました。まあ、結果は変わらんケド。
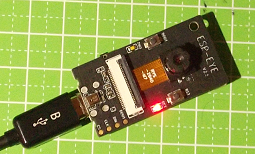
ESP-EYE、サンプルソフトで動作確認、そしてビルド環境をセットアップと2回作業をしたのですが、未だに自分で書いたプログラムでLチカさえも動かせてません。ESP-IDFの敷居が高いです。そこで今回は極端なショートカットでLチカを動かしてみました。ご存じESP32用genericポートを使えば3分でLチカ動いてしまう。
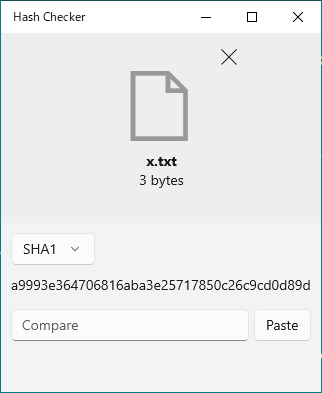
前々回、トラぶりながらもなんとかDMACを動かしてみました。しかし、SAMD51にはもう一つDMACがあることに気づきました。ICMというものです。ぶっちゃけメモリのある領域のハッシュ値を計算してくれるDMACです。監視対象のメモリが書き換わってしまったら割り込みをかけるなどということも可能。流石近代的。 “IoT何をいまさら(101) ATSAMD51、ICM、ハッシュ計算をする専用DMAC” の続きを読む
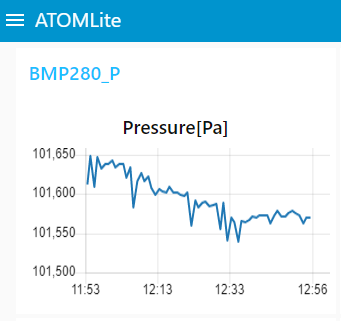
前回、定番の圧力センサ Bosch BMP280の補償計算をなんとかやっつけてMicroPythonで気圧と温度を測れるようになりました。今回は測った結果を、例によってMQTTに載せてNode-REDへ報告し、Dashboard上にグラフ表示してみます。まずは前回プログラムのモジュール化から。
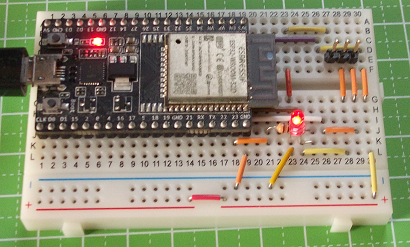
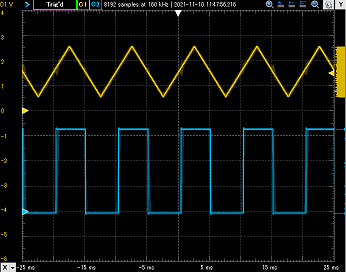
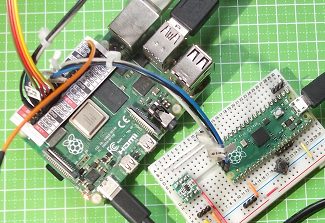
折角2コア積んでいるラズパイPicoなのに、大分前にちょっと2コアで動かしただけでした。これでは宝の持ち腐れです。無理にでも2コア使う方針といたしました。ま、動かしてみないと身に染みないこともあるっと。今回は2コアで外部端子からの割り込みを受けてみました。早速のお間抜けあり。
今回のRV32Mは拡張命令セットといいつつ、ほとんどの実装で採用されている筈のもの。整数掛け算と割り算であります。しかし命令が存在しても何サイクルで処理できるのかは実装依存です。まずはmulとdiv命令を使ってみて処理サイクル数を数えてみるところから始めました(前にもやったっけ?忘れているからいいか。)
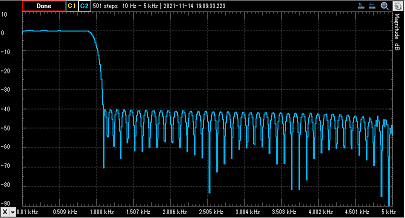
今回からいよいよデジタル信号処理らしい「手習ひ」に入れます。その最初はFIRフィルタです。まずは素直な「直接形」の実装でその威力をシミジミ味わえ、という感じでありましょう。アイキャッチ画像に振幅特性を示しましたが、いい感じじゃないでしょうか。こちらは書いてあるとおりにやっただけなのですが、ちょっと感動。
前々回、温度と湿度を測ってNode-REDに報告しました。今回は気圧も測るべしということで、定番の圧力センサBosch BMP280をMicroPythonから制御してみることに。ただし読み取りは自前のコードで実施。簡単に圧力読めるものと思っていたら、補償の計算大変なのね。自分でやってみないと身にしみませぬ。
Microchip社 ATSAMD51は、ADコンバータ、DAコンバータだけでなくアナログコンパレータ(AC)も搭載しています。2つの電圧を比較して大きい、小さいを判断できる回路。各種設定はソフトウエアですが、完全ハードウエアのコンパレータ的動作も可能。ただし今回は諸般の事情あり、割り込み受けです。
今回はラズパイPicoのDMAC(Direct Memory Access Controller)を使ってみるために、前回の母艦PCのArduino環境から母艦ラズパイ4のC/C++SDK環境に戻ってまいりました。とりあえず最低線ということでソフトウエアトリガのメモリ間転送をやってみたのですが、ラズパイPicoのSDK楽です(別シリーズでやったDMAC実験に比べ。) “鳥なき里のマイコン屋(145) ラズパイPico、C/C++SDKでDMAを使ってみる” の続きを読む