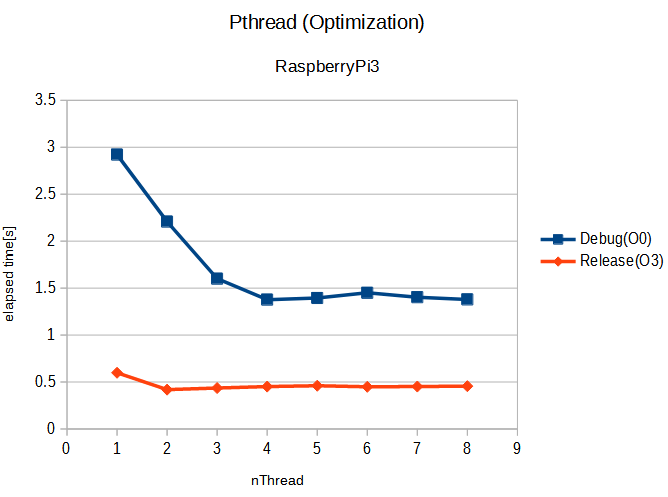
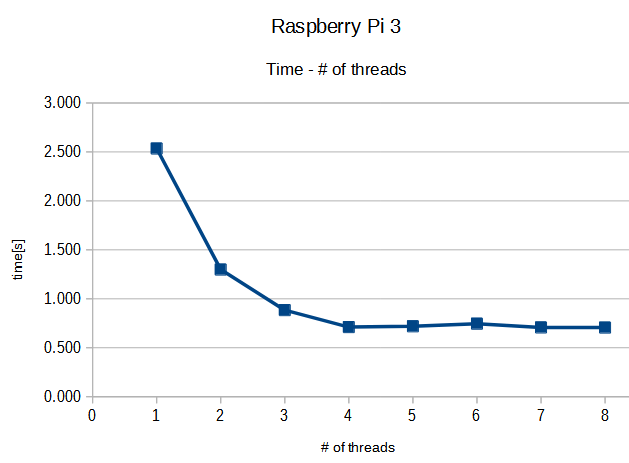
前回はPthreadを使って、スレッド数が多くなると処理時間が短くなるようなコードを書いてみました。今回はそれに最適化オプションを加えてみます。ヤバいな、ズルズルと深みにハマって行く感じがします。まずはCMakeの使い方もよく分かってないので、まずCMakeLists.txt内での最適化オプションの置き場所から調べないと。 “ソフトな忘却力(8) CMake、最適化オプションの置き場所。thread化の蹉跌?” の続きを読む
ソフトな忘却力(8) CMake、最適化オプションの置き場所。thread化の蹉跌?