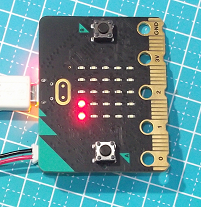
前回は、Arm Mbedコンパイラ上で、BBC micro:bitのBluetoothサービスを起動するオブジェクトを生成し、スマホとペアリングさせてその動作を確認いたしました。しかし、例によってドキュメントもよく読まずにやっているのでペアリングにはテコずり、他にも不明な点がポロポロと。今回は一度立ち止まって文書を確認しましたです。
連載小説 第38回 4ビットAI内蔵 “詠人舞衣子” の思い出


桜田モモエ
<これまでのあらすじ>
サイコーエジソン株式会社の詠人舞衣子(よんびとまいこ)です。わけあって4ビットAIを内蔵しています。心理学科卒文系女子ながら先端技術製品のICの営業をしていましたが、平成元年になった1989年、とうとう、現地法人のSS-Systemsへ海外赴任しちゃいました。一月遅れでトム君も合流し、同期が3人ともアメリカ赴任中です。 “連載小説 第38回 4ビットAI内蔵 “詠人舞衣子” の思い出” の続きを読む
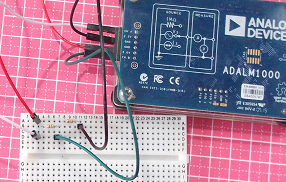
お手軽ツールで今更学ぶアナログ(40) ADALM1000、自己キャリブレション半分失敗?

前回、ADALM1000(M1K)での電流測定にオフセットのっているじゃん、という1件あり。テキトーな対処でお茶を濁しました。しかし、そういえば「キャリブレーション」というお言葉を何処かで見たような。。。早速やってみたのですが、半分成功、半分失敗?やり方がマズイの?それともハード?混迷は深いです。
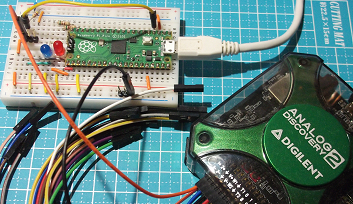
MicroPython的午睡(27) ラズパイPico、DHT11接続、ソフト現物合わせ
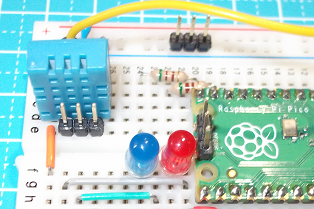
Raspberry Pi Pico上のMicroPythonで各種デバイスを制御してみております。今回は「電子工作業界?」定番の温湿度センサといってよいでしょう、DHT-11であります。「とりあえず」今回はソフトでタイミング制御、現物合わせです。動いているみたいなので、ま、いいか。
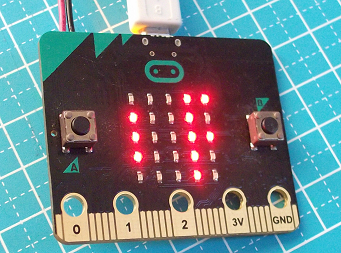
モダンOSのお砂場(24) Mbedでmicro:bit、BLEペアリング成功への道
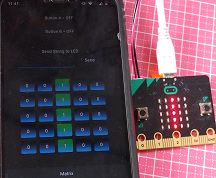
前回、Arm社のMbedオンライン環境で、BBC micro:bit用のオブジェクトファイルが生成できることを確かめました。特に MicroBitクラス を使ってプログラムするとMakeCodeエディタのブロックと同等な機能を呼び出すことができるので楽ちんです。今回は早速、主題でありますBluetoothをMbed環境から使ってみましたがペアリングにちょっと手こずりました。
鳥なき里のマイコン屋(124) M5StackとUno間、CANフレームのラウンドトリップ
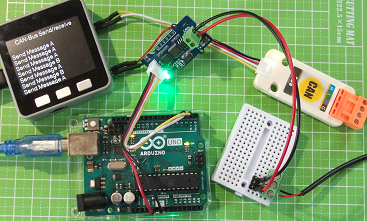
前回はM5StackからArduino Unoへ向かって一方通行のCANフレームの通信を行ってみました。当然、今回は双方向での通信の確認であります。お手軽にM5Stack発でUno経由M5Stack着の「ラウンドトリップ」です。同じArduino IDE使用で同じような仕事ですが、衣の下がちょっと違うのが見えまする。 “鳥なき里のマイコン屋(124) M5StackとUno間、CANフレームのラウンドトリップ” の続きを読む
MicroPython的午睡(26) ラズパイPico、入力端子からの割り込みの反応時間
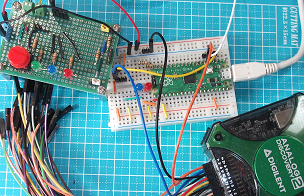
前回Timerコールバック関数の呼び出し周期の上限目安(被呼び出し関数にもよりますが)を測定しました。今回は端子からの割り込みに対してMicroPythonの関数が反応するまで(割り込み入力をトリガとして出力端子の状態を変更するまでの時間)の目安を測ってみたいと思います。最速どのくらいの処理がデキそうなのか。
モダンOSのお砂場(23) Arm MbedでBBC micro:bitプログラミング
今までJavaScript(実際にはTypeScript)環境にてプログラムしていたBBC micro:bitですが、C/C++環境への移行を考えております。移行先として、Arduino環境(別シリーズ)、Arm Mbed環境、Zephyrの3候補のうち、本シリーズではMbedとZephyrの2つをやってみる所存。まずはArm Mbed環境を調べてみました。
MicroPython的午睡(25) ラズパイPico、Timer周波数設定の上限?
MicroPythonが用意してくれているTimerクラスは便利なものです。面倒な設定もなく、指定した周波数でタイマハンドラを呼び出してくれます。ただ、周波数の上限あるはずだよね、どのくらいなの?ちょっと別件でマイクロ秒単位の制御をしたかったのです。どこまで対応できるものだか調べてみることにいたしました。
連載小説 第37回 4ビットAI内蔵 “詠人舞衣子” の思い出
桜田モモエ
<これまでのあらすじ>
サイコーエジソン株式会社IC海外営業部の詠人舞衣子(よんびとまいこ)です。わけあって4ビットAIを内蔵しています。心理学科卒文系女子ながら先端技術製品のICのアメリカ営業担当です。平成元年になった1989年、とうとう、現地法人のSS-Systemsへ海外赴任しちゃいました。一月遅れでトム君も合流し、スゴイ事になっちゃいました。 “連載小説 第37回 4ビットAI内蔵 “詠人舞衣子” の思い出” の続きを読む
お手軽ツールで今更学ぶアナログ(39) ADALM1000、電流測定のオフセット?
アナデバ社(ADI社)のWeb記事「StudentZoneを端から」読ませていただいております。前回ようやく実験シリーズに再突入できて嬉しかったのですが、まだ基本の回がつづきます。今回は抵抗使って分圧とか分流とかの実験です。正直、かったり~な的な。しかし前回のグラフに影を落としていた「電流の測定誤差」の1件が再び登場、どうしたものか。
MicroPython的午睡(24) ラズパイPico、CDSセンサをADCに接続

さて今回は、ラズパイPicoのADCを使ってみたいと思います。12ビットのADコンバータであります。真面目に精度を出そうと思うとチョッと大変そうですが、今回はとりあえず精度は気にせず。明るい、暗いがアナログ値で分かれば良いだろ~ということでCdSセンサを接続。
トホホな疑問(34) BBC micro:bit V2のArduinoピン番号はまた違う
鳥なき里のマイコン屋(123) M5StackとArduino Uno、CANバス接続

別シリーズにてArduino用のCANバスIFと、M5Stack用のCANバスIFを手に入れ、ぞれぞれCANフレーム送信をロジアナ機能で確認いたしました。当然次のステップとしては2つをCANバスで接続して通信できることの確認です。今回はM5StackからArduinoへ一方通行にしたので簡単。