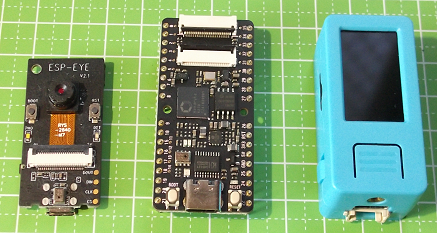
上のアイキャッチ画像に掲げましたのは、左からESP-EYE、MAiX-BiT、M5STICK-VのエッジAI用マイコン3機種であります。いずれもカメラで画像を取得し、認識させるような用途を狙っています。今回手に入れたのは真ん中のMAiX-BIT(マイク付版)です。お求めやすいお値段(次機種が出そうだからか?)に惹かれて。
鳥なき里のマイコン屋(149) K210、64bit RISC-V、MAiX-BiT到着
デバイス作る人>>デバイス使う人>>デバイスおたく
上のアイキャッチ画像に掲げましたのは、左からESP-EYE、MAiX-BiT、M5STICK-VのエッジAI用マイコン3機種であります。いずれもカメラで画像を取得し、認識させるような用途を狙っています。今回手に入れたのは真ん中のMAiX-BIT(マイク付版)です。お求めやすいお値段(次機種が出そうだからか?)に惹かれて。
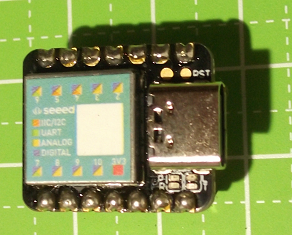
Microchip社のArm搭載マイコンSAMの投稿が大分溜まったので、散在する投稿の総目次を作るとともに、シリーズを独立させることにいたしました。「AT SAMの部屋」であります。独立初回の今回は、先週手に入れたSeeeduino Xiaoを組み立てて、何時ものとおり、まずはLチカから。 “AT SAMの部屋(1) SAMD21搭載、Seeeduino Xiaoで吉例Lチカ” の続きを読む
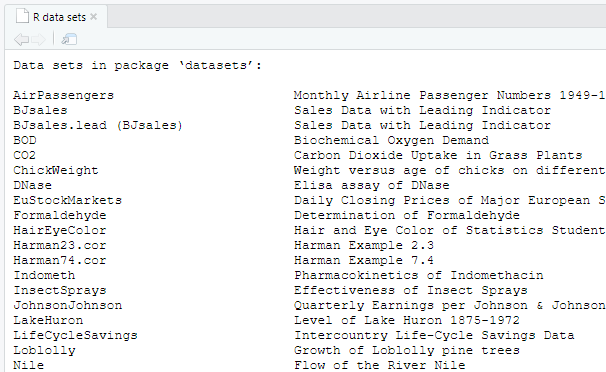
モダンOSに続く「お砂場」シリーズ第2弾?は「データ」です。最近、データサイエンティストの活躍凄まじく?年寄りはついていけません。xxの冷や水、世にあまたある「サンプルデータ」を味わう程度でもよろしかろうと。今回は長らく眠っていたR言語を復活させて、大量に含まれているサンプルデータセットの最初の1個を触ってみました。
前回、前々回とFIRフィルタで特性も同じ。しかしフィルタを構成する形は異なりました。しかし今回は前々回と形も同じ。違うのはソースコードの書き方のみ。折角のC++のコンパイラだし、「クラス」を使わずにはいられないっと。「テンプレート」もね。確かに見通しよくなるけれど、年寄りはC++には染みついた抵抗がある。 “手習ひデジタル信号処理(11) STM32F446、FIRフィルタその3,直接形Class” の続きを読む
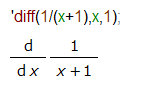
前回が極限であったので、今回は導関数、微分であります。ようやくシリーズタイトルに近づきつつ(まだ先は長いけど)ある感じがします。通例、「分かり易い」Mathmaticaと「知っているべきことが多い」Maximaという感じ(個人の感想です)なのですが、今回は逆。Maximaの方がストレートな印象。ホントか?
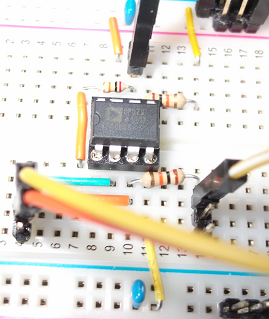
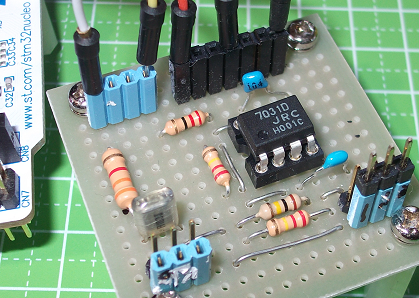
「アナデバ社(ADI社)のWeb記事『StudentZone』を初回からすべて読む」は、ようやく2020年2月号に到達。今回はオペアンプ使ったアナログコンパレータであります。非反転、反転、ヒステリシス対称、ヒステリシス非対称とやること多いです。今回も恐れ多いが申し上げたい儀これあり、なのだな。
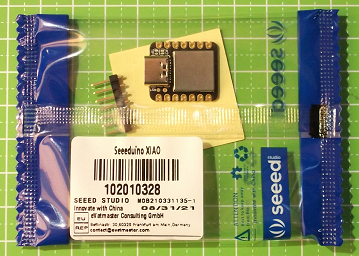
別シリーズで周辺回路をプログラムしていて Microchip社(元はAtmel)のSAMシリーズに関心を持ちました。ついてはファミリ製品にも幅を広げるべく、今回SAMD21マイコン搭載の小型マイコンボード購入。半田付けを始める前に、Microchip社の32ビットMCUのラインナップの中でのSAMD21の位置づけについて調査をばいたしました。
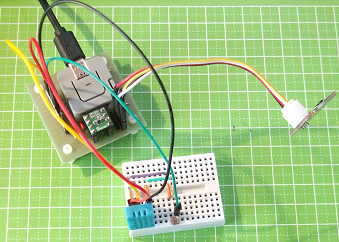
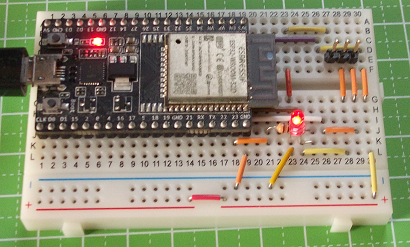
今回はM5 ATOMLiteのアナログ機能を使ってみるべし、と思い立ち、光量によって抵抗が変化するCdSセルを取り付けてみました。以前ラズパイPicoで接続した筈の部品をそのまま流用したので、MicroPythonのコードもほぼほぼ流用。しかしね、なんか特性変わってるんじゃね。まずはATOMLiteとの接続ですが、端子少ない割に意外と使えます。
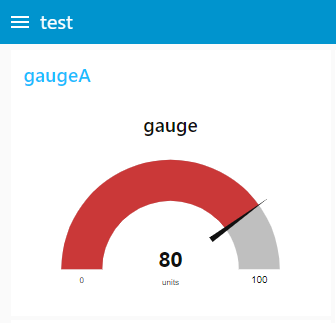
前回は、1つのノードの中で一度に多数の表示と入力が可能な formノードでした。今回は、単機能なのだけれども4通りの「顔」があり、色の変化で注意を引くこともできる gauge ノードです。今まで何の気なしにお世話になっていましたが、上手く使うと異常値などをアピールするにはもってこいなDashboardノードじゃないかと思います。
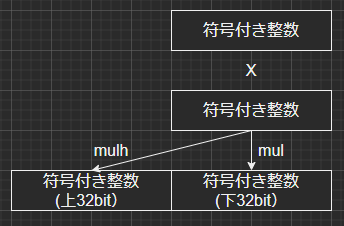
前回は、RISC-Vの乗算命令と除算命令を1命令づつ動かしてみました。今回は 乗算命令 の全貌を見てみます。といっても4命令ですが。実装がシンプルになるように考慮した結果でしょうが、命令の使用方法はクセが強い、気がします(個人の感想です。)それにnucleriのツールチェーンにも制限が?
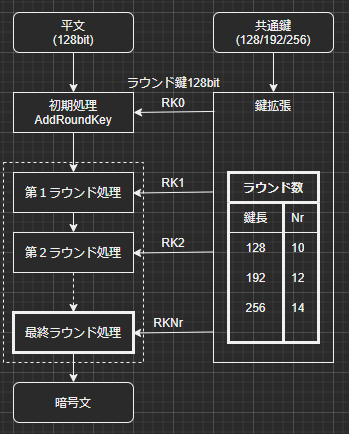
前回は、ATSAMD51マイコンのSHA1計算ハードを試用するプログラムを書いた後で、テストパターン生成用のプログラムを作りました。こういう泥縄ではいかん、ということで、今回はマイコンプログラムの前にテストパターン生成用のプログラムを作っておくことにいたしました。AES暗号化、1ブロック「だけ」です。
ESP-EYE使いESP-IDF環境でLチカをプログラムするのを「敷居が高い」などといってMicroPythonに逃げてしまいました。そのままでは進歩がないので、手足があって分かり易いESP32-DevkitCにもどってESP-IDF環境でLチカしてみました。素のままではモダンOSにならないので、FreeRTOS機能を使う縛りでです。
今回は2冊同時です。アイキャッチ画像左は、インテルの iAPX86,88,186 and 188 User’s Manual、1983年。右は「マイクロコンピュータ ソフトウエア技術」吉田著、マイテック 1979年です。前回16bit話だったので、今回は時代を遡って8ビットから16ビットへの移行期について。
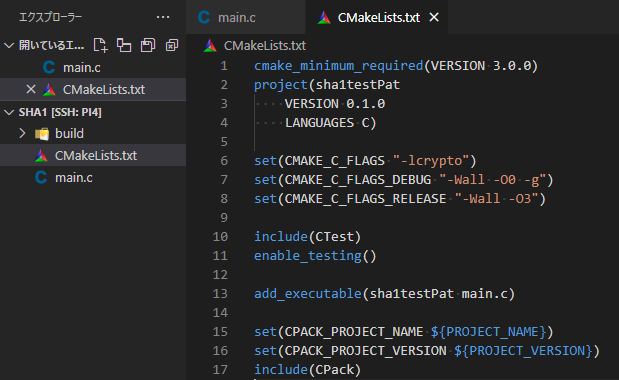
先週別件でメモリ内容のハッシュをハードウエアで計算しつづけるDMACを使ってみました。ハッシュ値を求めることにも使えますが、改竄対策?かな。とりあえずのサンプルデータで動作検証したのですが、テスト用の入力パターンの生成が手作業なのは何とも。そこでラズパイ4上でテストパターン生成プログラムを試作してみました。 “ソフトな忘却力(11) RPi4、SHA1、パディング入りのテストパターンとダイジェスト” の続きを読む