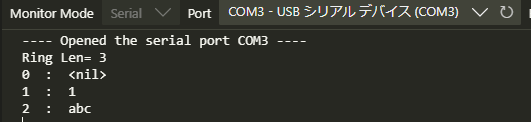
前々回heap、前回listとGoの標準ライブラリのcontainerを練習。今回はcontainerの最後の一つ ring です。しかし似たお名前のRingBufferがTinyGoのMachineパッケージの中に存在。今回は2つを比較してから、標準ライブラリのringの方をmicro:bit上で練習してみます。
GoにいればGoに従え(29) container/ringをTinyGoで使ってみる
デバイス作る人>>デバイス使う人>>デバイスおたく
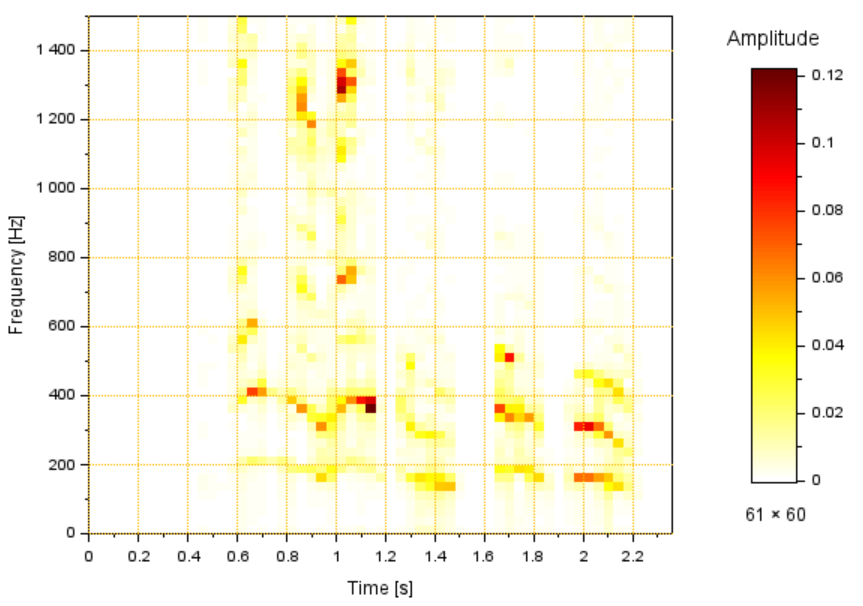
前回、音声信号をScilabにロードするために音声関係関数をさらってみました。全体の雰囲気は分かったのだけれど、解析用のプロットまで手が回らなかったです。そこで今回は前回積み残し部分を練習。しかしその前にWindows上での音声データの生成のところでまた一つ悶着あり。音声データなど普段扱わないから無知なのよ。

前回、ESP32版MicroPython上で、MicroPython特有のパッケージ管理ツール mip を走らせんと試みましたが一山超えて二山目で止まってました。今回はその二山目を超えるべくネット接続を追加してみました。あれよあれよと言ううちに一瞬でパッケージのインストールOK、mip 動作してしまったみたいです。
“MicroPython的午睡(117) ESP32版、net接続すれば御勝手mip動作OK” の続きを読む
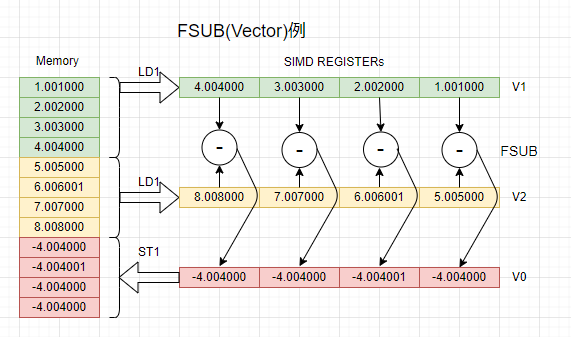
前回A64のベクトルロード命令をあらかた終えたつもり。今回からA64のベクトル(SIMD)演算命令に入ってまいりたいと思います。その初回はFSUBです。3オペランドの「典型的」演算かつ、ソースの順序に依存する命令ということでの「起用」であります。でも以前にもFSUBというニーモニック自体は使ってるんでないかい?
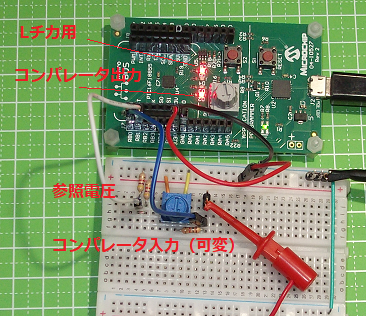
前回はZCD(ゼロクロス検出器)で割り込みかけてみました。今回はアナログ入力電圧2つを比較する内蔵コンパレータを使ってみます。なにか基準電圧を上回ったら信号を出力したりできるもの。結果で割り込むことも可能ですが、直接外部出力信号とすることも可能。外付けオペアンプなど不要で済むのはありがたいかも。
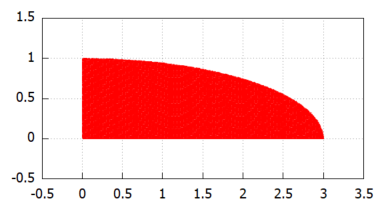
前回はドーナツ型の積分領域を極座標変換して2重積分しました。今回も極座標変換ですが、積分領域が楕円になりました。前回同様、再びヤコビアンさんが登場しますが、円の時とはチョイと違うみたいです。変数変換にも楕円の長軸、短軸長さが入ってくるし。まあ、極座標変換してしまった後はMaxima様の一撃にてお答えは求まるっと。

今回はArm Cortex-M4コアのルネサスマイコンRA4M1を搭載したArduino UNO R4上で、FreeRTOSのQueueを使ってみたいと思います。複数のタスク間で安全にデータを受け渡しできる便利な構造です。データの送受ができることは当たり前なので、今回は送受にどのくらいの時間がかかるのだが目安を観察。 “モダンOSのお砂場(66) UNO R4、ルネサスRA4M1でFreeRTOS、Queue” の続きを読む
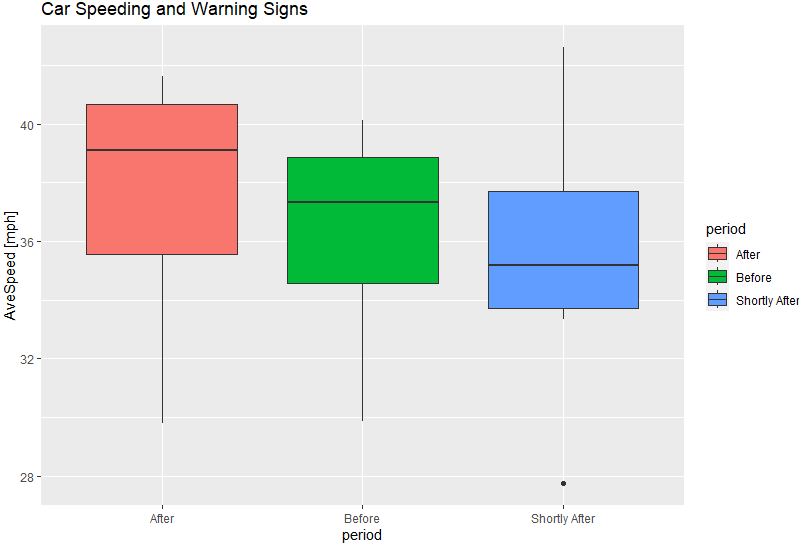
前回に引き続きbootパッケージ中のサンプルデータを眺めています。今回は英国の「交通標識とスピード違反」の関係データセットらしい amis です。R素人の処理の結果として出てきた意外なグラフに愕然。どこかの処理を間違えてないか、自分?それとも人間心理の深淵をば覗き込んでおるのか?本当はどうなんだろ。
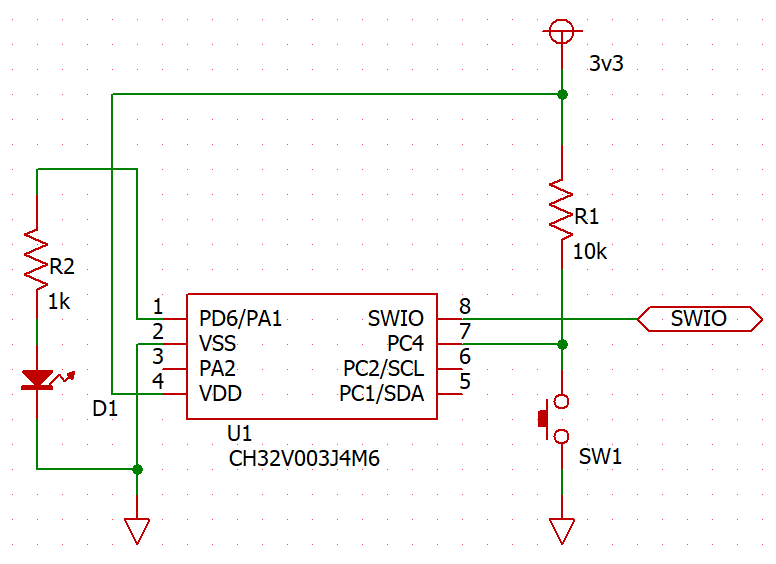
酷暑にもめげず、RISC-V搭載の超お求めやすい32ビットマイコンCH32V003を触っています。今回はGPIO端子から割り込みをかけてみます。Arduino IDE環境での作業なので「いつものやり方でOK」かというと微妙に違うんだこれが。前回のようにCH32V用の低レベルなAPIを呼びだす必要はないのですが。
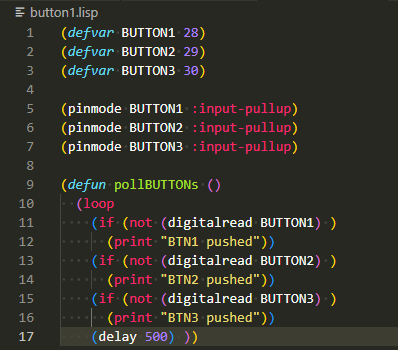
前回は中身ばかりで外まで手が伸びませなんだ。今回はマイコンで走るuLispならではの外部入力も含めてみます。まずはWio Terminalの上端面に3つならんでいる「青いユーザーボタン」をセンスできるようにしてみます。LCDパネルに向かって右からボタン1,ボタン2、ボタン3であります。でも端子名は何?
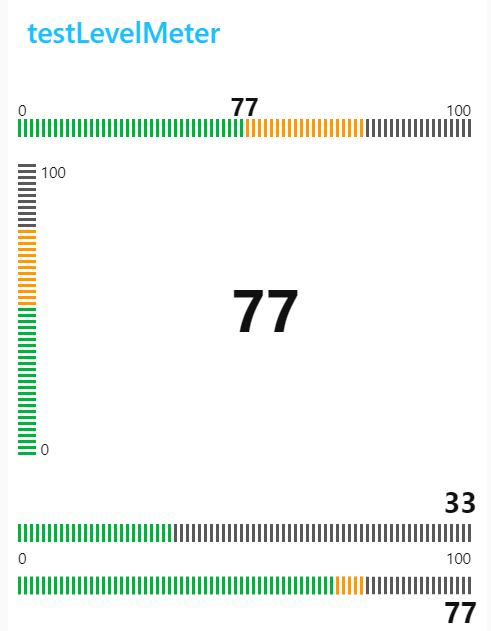
前回までworldmapでしたが、今回はui-levelノードです。ダッシュボードには元々gaugeというノードが含まれており、そのオプションとして「Levelメータ表示」も存在します。見た目は水位計あるいは燃料計風。それにたいして今回のui-levelノードはLEDオーディオメータ風です。お好みね。
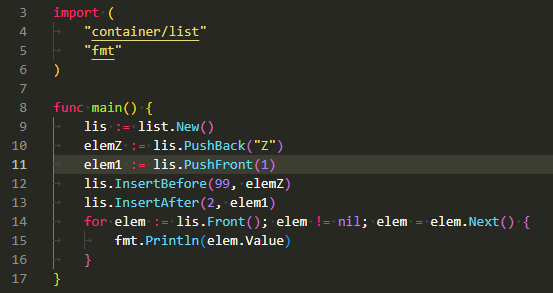
前回はTinyGoでも「フルの」Goの標準ライブラリが立派に使える、ということで「値によって順番をつけて」データを格納してくれるheapを使ってみました。さて今回はその流れで container/list を使ってみます。順番を管理できるデータ構造です。それにどんな型のデータを入れても良いし。よくあるリスト構造だね。 “GoにいればGoに従え(28) container/listをTinyGoで使ってみる” の続きを読む
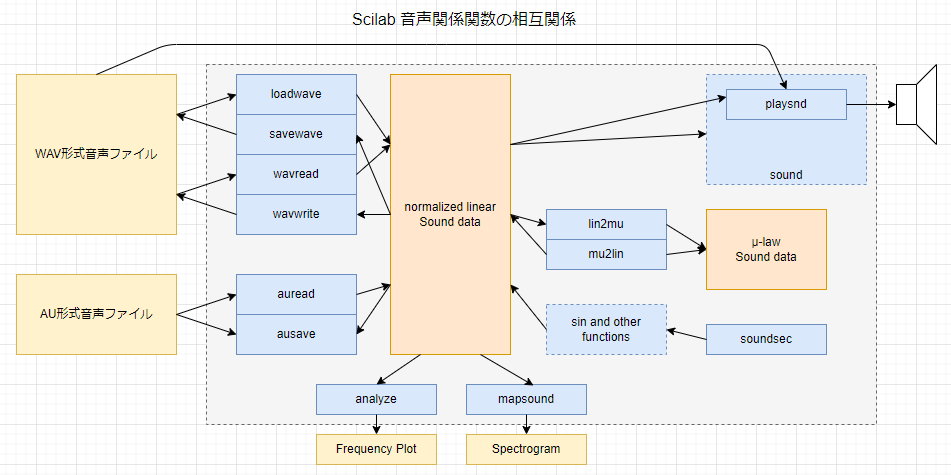
前回RTLSDR発のIQデータをPythonプログラムからScilabへ輸入。Scilab上でPythonプログラムと同じ処理行い音声データとして再生しました。今回からは逆方向、音声データで変調してRTLSDRから輸入したデータと同等の信号の生成を試みます。まずはScilab上での音声データの処理関数のお勉強から。
“手習ひデジタル信号処理(96) Scilab、音声データ入出力のための関数類まとめ” の続きを読む
前回はmpy-crossツールでmpyファイル化したスクリプトを、ストレージに置いて使ってみました。今回は外部のリポジトリからモジュールをダウンロード&インストールしてみる1回目デス。MicroPythonにもモジュール管理ツールあり、ということで mip 試してみたんですけど手元のESP32版では試行錯誤中、トホホ。