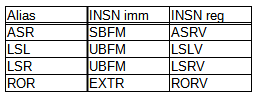
前回まで練習してきた即値でビット数を指定するシフト、ローテイト命令はビットフィールド転送とレジスタ抽出命令のエイリアスでした。しかしシフト、ローテイトには「片割れ」があります。レジスタでビット数を指定できる命令です。そちらも「エイリアス」あり、といいつつ、こちらはモロそのものじゃん。
ぐだぐだ低レベルプログラミング(78)ARM64(AArch64)、シフト、ローテイトの片割
デバイス作る人>>デバイス使う人>>デバイスおたく
前回まで練習してきた即値でビット数を指定するシフト、ローテイト命令はビットフィールド転送とレジスタ抽出命令のエイリアスでした。しかしシフト、ローテイトには「片割れ」があります。レジスタでビット数を指定できる命令です。そちらも「エイリアス」あり、といいつつ、こちらはモロそのものじゃん。
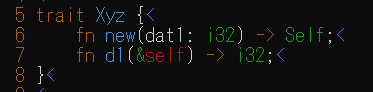
ちんたら勉強しているRust言語です。Exampleのソースコードを拝見していて気になるのが、selfだったり、Selfだったりする self です。Pythonのselfのような「慣用語」的お約束ではなく keyword みたいです。大文字になったり、小文字だったり、&がついたり、::がついたり一体全体これは何?
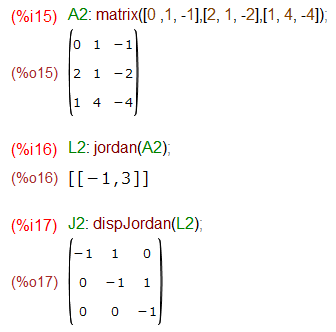
前回つい手がすべってタイトルに「その1」と書いてしまったので今回は「その2」です。蛇足な感じがしないでもないです。参照させていただいております線形代数の教科書(馬場先生)では3次の正方行列のジョルダン標準形をいくつかに分類し、それぞれに解法を懇切に示されているのです。しかし、当方手順は前回と同じ。いいのかそんなことで。
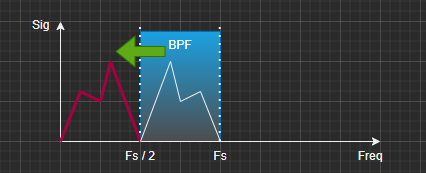
前回、三上先生のサンプルプログラムで、甲子園中継が受信できたと喜びました。しかし1点疑問あり。サンプリング周波数は900kHz(ナイキスト周波数は450kHz)なのに、受信したNHK第1放送(東京)は594kHzです。なぜ受信できるの?ここで登場するのがアンダーサンプリングとBPF(バンド・パスフィルタ)です。 “手習ひデジタル信号処理(50) SDR、アンダーサンプリング、ナイキスト周波数より高い信号” の続きを読む
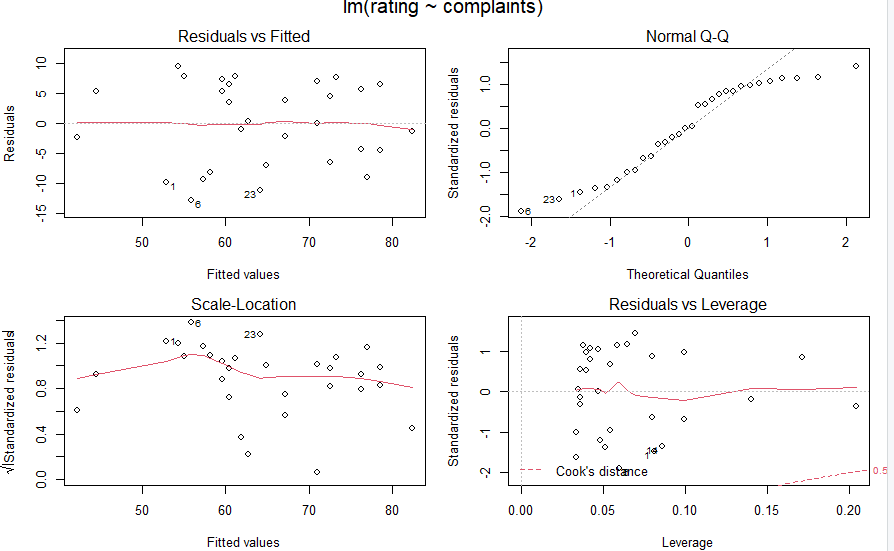
今回のデータは米国の(半世紀くらい前の)金融機関らしい組織の事務職員のアンケート調査みたいなものの集計らしいです。R言語の処理としては線形回帰の練習データです。淡々と処理はできるんじゃないかと思いますが、人事情報的な「意見」の集約なので「その意味」がとても気になります。データとしてはすべて%で表される数値なのですが。
“データのお砂場(44) R言語、attitude、%で測れる「態度」ってなんなのよ?” の続きを読む
今回はjsonノードです。文字列とNode-REDの主要データ構造であるJSONオブジェクトを相互変換できるもの。実用的には変換時にSchemaによるバリデーションを行えることが重要かと。でもね、面倒臭いのよSchema。今日のところは自分で自分にデータを投げつけているだけなので省略。いいのか、そういうことで。
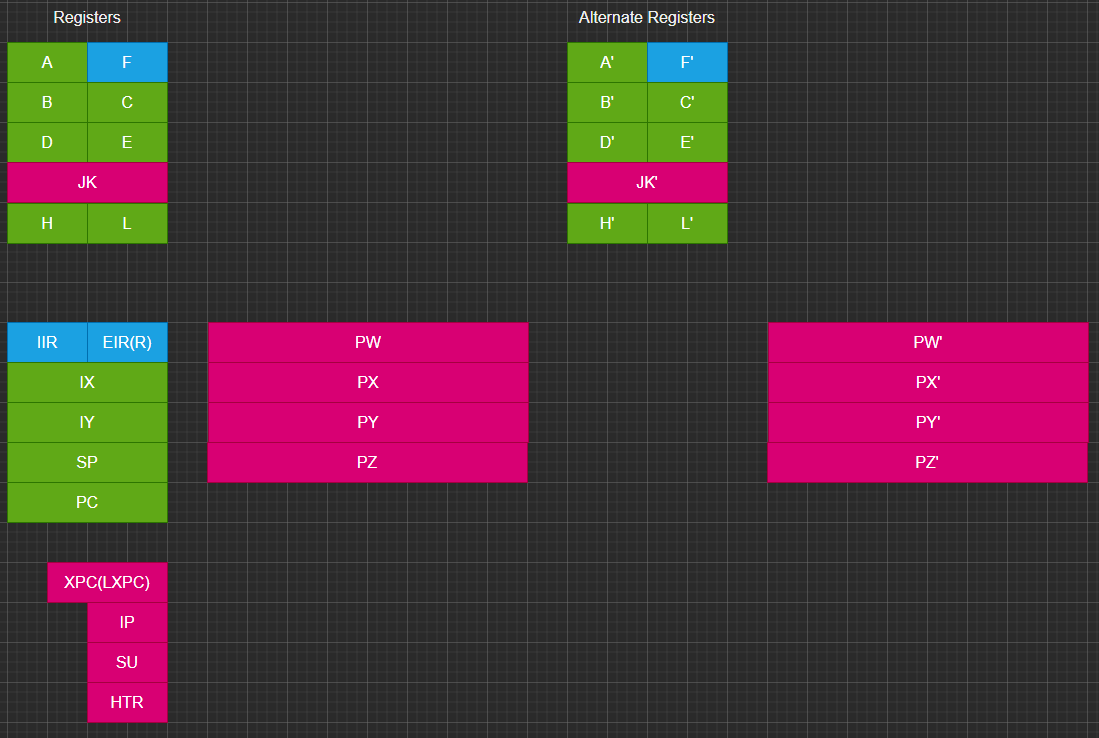
うさちゃんRabbit4000のDynamic Cのライブラリを読んでいるとインライン・アセンブラ・コードに迷いこみます。RabbitシリーズはZ80愛に溢れているCPU、Z80上位互換です。Z80のつもりで大体読めますが、時々「知らない」レジスタなどに遭遇します。今回はCPUレジスタを図にまとめてみました。
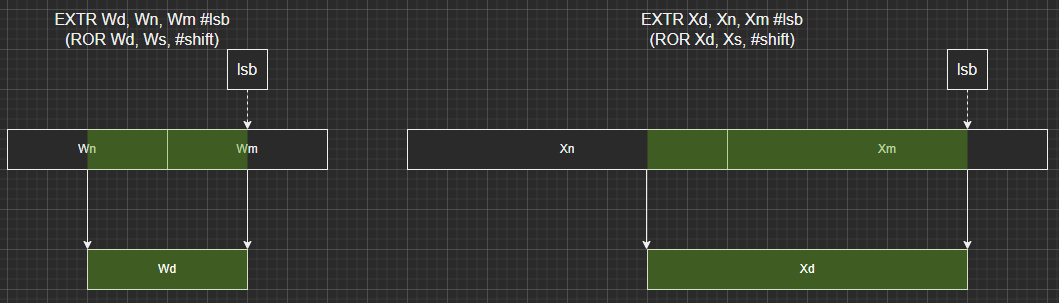
前回までのビットフィールド転送命令群と比べて今回のレジスタ抽出命令EXTRの動作は分かり易いです。エイリアスもシンプル、たった1個。ROR(右ローテイト)命令だけです。ただ、左にシフトして取り出すような操作のEXTRに対して、詰まっているデータから見ると右ローテイトに見えると。左右が時々混乱するのは私だけ? “ぐだぐだ低レベルプログラミング(77)ARM64(AArch64)、EXTR、RORでもある” の続きを読む
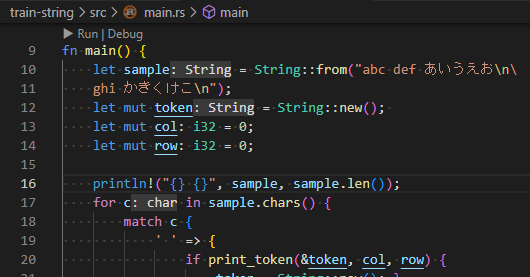
テキトーに書いても走る(走ったように見える)言語もあれば、走る前に阻止される言語もあります。どうもRustは後者であるようです。Rustでの文字列のとり扱いを始めましたが、Cの文字列に慣れた頭でいると、いろいろ転換せねばなりませぬ。文字列を配列とみて添え字でアクセスするような方法は禁止じゃと。 “やっつけな日常(32) Rustに入ればRustに従え、文字列操作、おっかなびっくり その1” の続きを読む

前回まで、「対角化」などを「それなりに手順」を踏んで行ってきました。今回のジョルダン標準形への変換はどうしようか迷いました。そのものズバリのJordan行列を扱うパッケージ diag をloadすれば、ほぼ1撃で変換できてしまう。まあ、出来ることをわざわざ刻むことも無し、お楽が一番。手順のみ確認させていただきます。 “忘却の微分方程式(57) 反復練習20、ジョルダン標準形への変換その1” の続きを読む
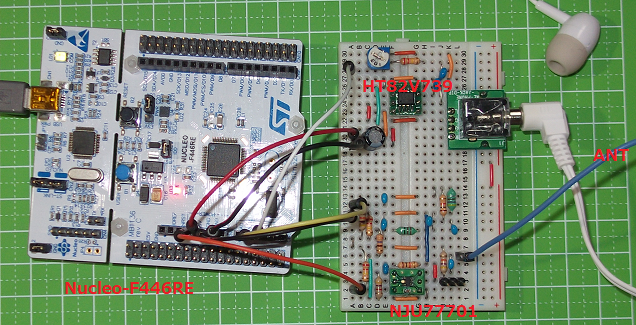
前回までに、Arm Cortex-M4コアのSTM32F446マイコンでの「ダイレクト・サンプリングSDR実験」用フロントエンド回路が出来上がりました。これからSDRのお勉強に入りますが、初回は早速AMラジオを受信してみます。なんたって三上先生のサンプルプログラムのバイナリがあるので、書き込めば動く筈。
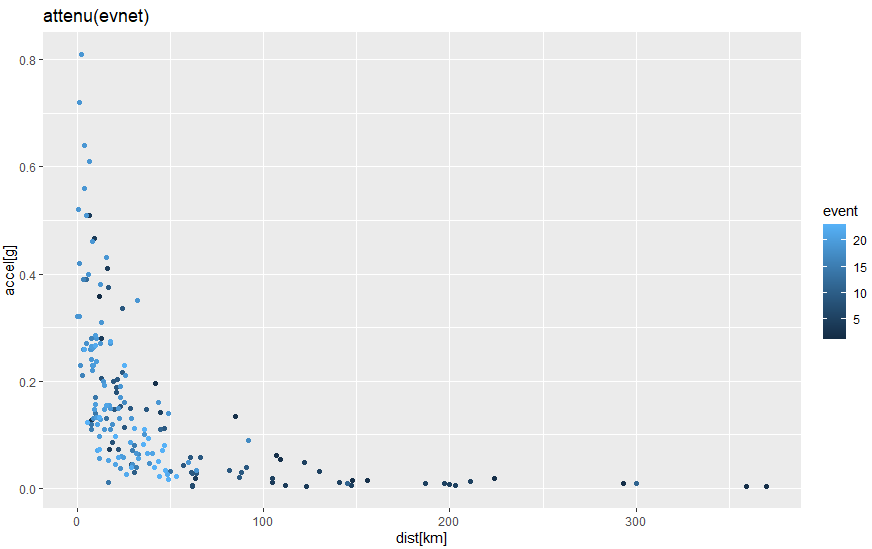
前回は演習用の人工データでしたが、今回は自然現象の観測データです。米国カリフォルニア州内で発生した23個の地震のピーク加速度データです。古いデータのようですが比較的デカイ地震ばかり。震源までの距離とピーク加速度の間に関係性を見出すための練習データに見えます。しかし多くの日本人は知っています。地震は一筋縄ではいかねーと。
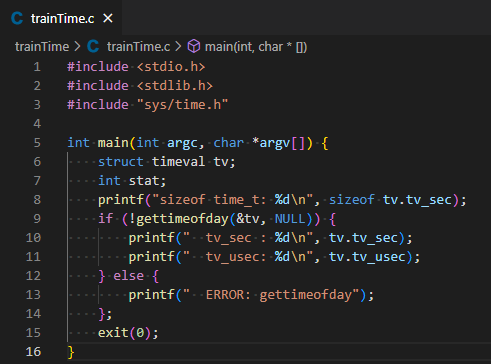
別件でdateコマンドを使って思い出したのが UNIX時間であります。Linuxでも使用の「伝統」です。そういえば昔は32ビットであったので2038年問題ってのが有った筈。手元のLinux機、ラズパイ4はようやく64ビットOSに切り替えましたが、ラズパイ3は32ビットOSのままです。time_t型の件、調べてみました。
“ソフトな忘却力(23) time_t型、64bit OS上なら64bitになっていたのね” の続きを読む
今回は watch ノードです。watchといっても腕時計ではありませんよ。指定したファイルを監視してくれるノードです。Node-REDの「外側で」起こった変更を捕捉するのには便利な機能じゃないかと思います。捕捉できたところで次にどうするのかはまた別の話ですが。