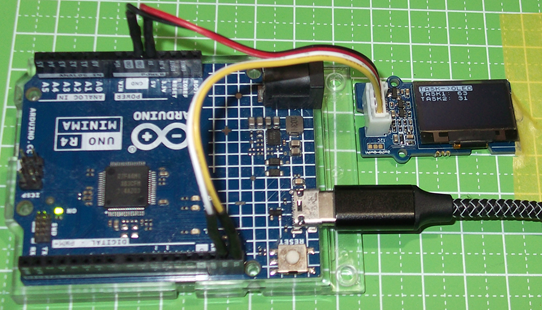
別シリーズにてUNO R4にOLEDディスプレイを接続。これでprintfしなくても「出力」可能となりました。とは言え一つしかない虎の子のOLEDを複数Taskで奪い合うのは醜い。そこでOLED表示TASKを作製、他のTASKどもはそちらにQueue経由でお願いする形にいたしました。今回のはそのプロトタイプです。
モダンOSのお砂場(78)UNO R4でFreeRTOS、Task発Queue経由OLED行
デバイス作る人>>デバイス使う人>>デバイスおたく
別シリーズにてUNO R4にOLEDディスプレイを接続。これでprintfしなくても「出力」可能となりました。とは言え一つしかない虎の子のOLEDを複数Taskで奪い合うのは醜い。そこでOLED表示TASKを作製、他のTASKどもはそちらにQueue経由でお願いする形にいたしました。今回のはそのプロトタイプです。

前回はM5Stackの前面パネル下に3個あるボタンを押してみました。今回は側面(下側)に移ってmicroSDカードスロットにアクセスしてみたいと思います。SDカードアクセスはESP32用の標準的なMicroPythonと共通ではあるものの、M5Stackのハードウエア特有の設定をしないとなりません。
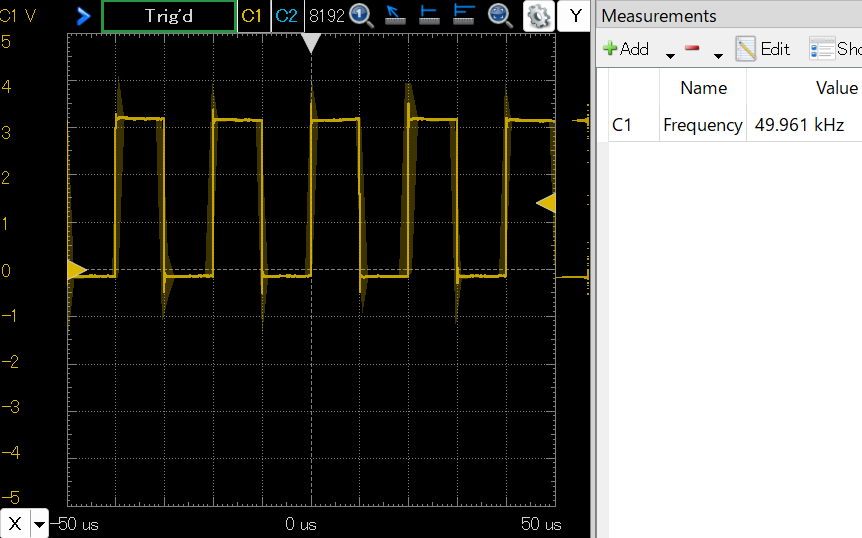
前回に続きTIMER0を試用。今回はワンショットで出力パルス幅を制御するのに使ってみたいと思います。外部でボタンが押されたことをトリガにして、ボタンが押された直後から所定の幅のパルスを一発出力するもの。制御ではアリガチ?今回は16ビット利用なので最小4μsから最大約260msまでのパルスを自由自在だと。
前々回、赤外線リモコンの波形(NECフォーマット向け)を生成するScilab関数を作製。その一方、別シリーズにて実際にNECフォーマットのIR信号を出力しているらしいリモコンの実機波形をCSVファイルに取得しました。今回は取得した実機波形から01の生データを解読、前回作成の比較関数で期待値と比較してみます。 “手習ひデジタル信号処理(107) Scilab、赤外線リモコン実機波形の読み取りと解読” の続きを読む
前回に続きSIMDの比較命令の練習です。今回は浮動小数型。条件一致すればオール1、不一致でオール0が結果です。いつもの通りA64の命令多すぎ、と書いておきます。前回の整数型であったビット比較が無くなって1個減ったと思ったら、絶対値比較が2個も増えている。かえって練習するパターン増だと。流石だなA64。

別シリーズでルネサスマイコン搭載のArduino Uno R4を使用中。自発光の小型ディスプレイを接続したくなり長らく眠っていたOLEDの小基板を取り付けることに。まずはUno R3で動作確認作業を行おうとしてハマリました。最初からUno R4でやってればよかったんであります。R3でトラブルような周辺装置もあるのだと。
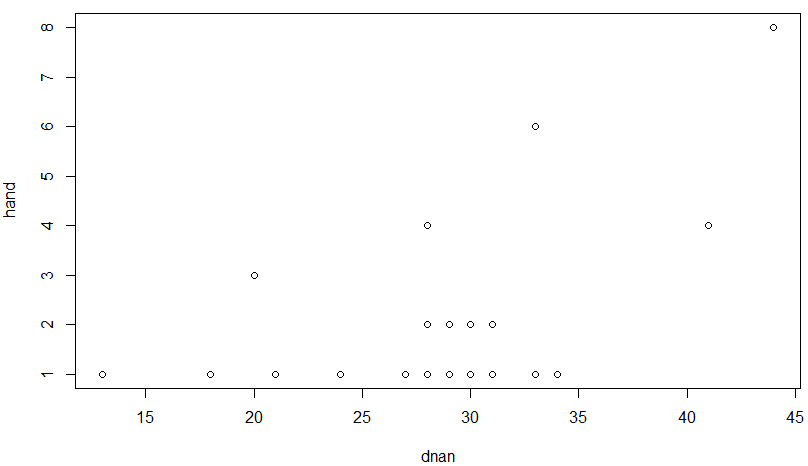
R言語のパッケージbootには、ブートストラップ法のサンプルデータセット多数、しかし今回もブートストラップ法は試みておりませぬ。いつやるの?さて、今回のデータセット名は claridge です。そのお名前で検索すると「五つ星」高級ホテルがドーンと見つかりますが関係ないみたい。左利きの傾向と遺伝に関するデータらしいっす。
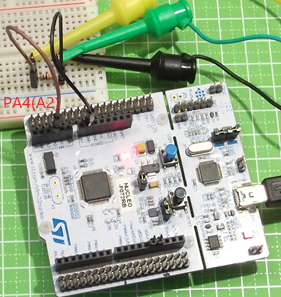
STMicroelectronics社純正開発環境Cube IDEを使用し、STM32のHAL(hardware abstraction layer)を思いつくまま試用中。今回はアナログ出力を行ってみたいと思います。DAコンバータね。まずはソフトウエアループで出力タイミングを制御してゆっくりした三角波を出力してみます。
“STM32三昧(3) Cube IDEでDAC出力、ソフトウエアトリガ、Nucleo” の続きを読む
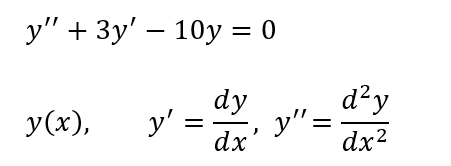
約100回近い「単元」を乗り越えて今回から微分方程式に戻ることになりました。長かったです。とはいえまだ、Maxima様のオペレーションを固めるための反復練習の一環であります。最初はフツーの常微分方程式の一般解を求めるというアリガチなところから。しかし「一般解を求める」というところが意外にメンドイ?良い方法は無いのか?

前回はUIFlow2版MicroPythonをつかってM5Stackの表示に触ってみました。今回はディスプレイ下部に並んでいる3個のボタンを使ってみます。前回同様M5モジュールの中のクラスや関数を使うので、ついでにM5モジュール内の「細々」したところにも触っていきたいと思います。API多すぎ。とても触り切れませぬ。
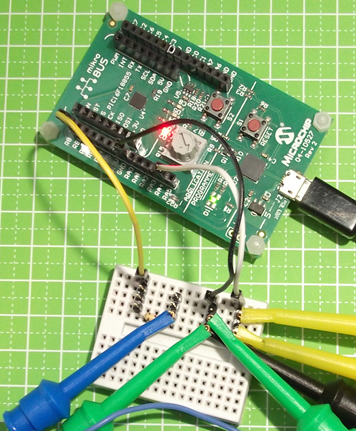
前回は内部のクロックを外部出力するCLKREFモジュールを練習しました。今回は外部からクロックを入力して数えてみます。PIC16F18855はタイマ(カウンタ)が充実、0から6まで7本もあります。今回はそのうちのTIMER0を使って外部クロックをカウント、周期的にタイマ0割り込みを発生させてみます。
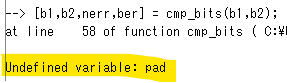
このところ「バイナリシーケンス」の操作に関する低レベルな関数を作製したりしてきておるのですが、ちょっと困ったことがあります。comm_tbx内のバイナリシーケンスの比較(ビットエラーの検出)をするための関数cmp_bits()がエラーで落ちます。今回はこの回避の仕方および「より低レベルな」代替関数作成。低レベル指向。
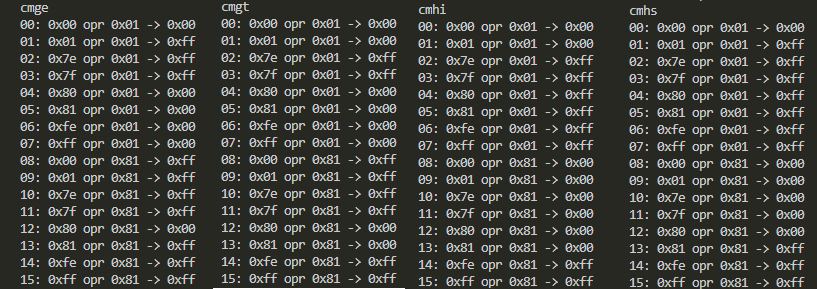
今回練習するのはSIMDの比較命令です。スカラー同士の比較であれば分岐のためですが、SIMDの場合は各要素の計算を「通すか否か」のマスク的なものの生成。今回対象は浮動小数比較でなく整数のみですが、いつものとおりA64の命令多すぎ。便利そうな命令は網羅するのがArmの行き方か。ミニマリストではないわいな。多分。
前回は周辺装置の割り込みの「元締め」NVICの動作状況を見てみました。しかしNVICを経由しないArmコア固有の例外、システム割り込みの中にSysTickというものも含まれているのです。プロセッサクロックで動作している高速なタイマです。今回はこいつが使えるのか否かを確かめてみます。 “GoにいればGoに従え(41) ラズパイPico、ArmのSystick使えるの?” の続きを読む