Arm Mbed環境は、オンラインでArmベースのマイクロコントローラのRTOSプログラムをお楽に作れるので重宝させていただいてきました。しかし、本日2024年7月11日、Arm Mbed様から End of Lifeの予告を受け取りました。ちょっとビックリ。まあ、2年の猶予はあるのだけれども。
帰らざるMOS回路(74) Xilinx Vivado、risc-v練習プラットフォーム改良
前回、Vitis IDEから「ソフトウエア・デバッガ」を使いました。使いやすいじゃん。しかし「プラットフォーム」のRISC-V(MicroBlaze-V)コアの設定がデバッガのことを無視した設定になっていたので、デバッガの機能を十分に引き出すことができませんでした。そこでハードを作り直しね。こういうときFPGAはお楽。
“帰らざるMOS回路(74) Xilinx Vivado、risc-v練習プラットフォーム改良” の続きを読む
帰らざるMOS回路(70) Xilinx Vitis、RISC-Vから吉例Lチカ
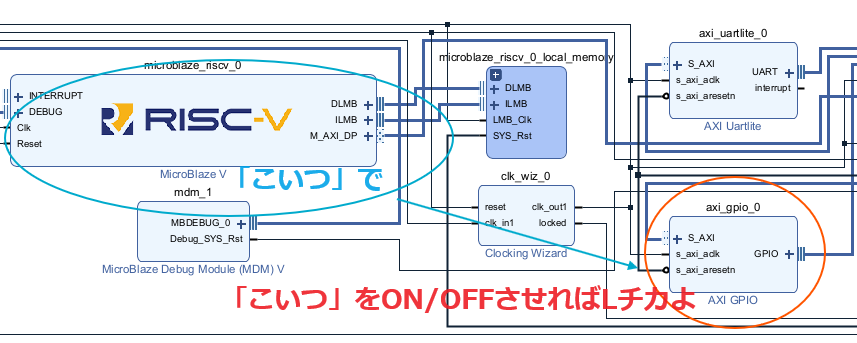
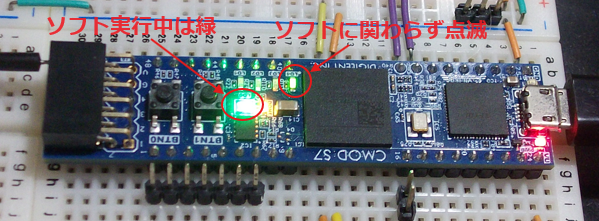
前回は、FPGA上のRISC-Vコアで走るソフトウエアでHello Worldできました。ようやくだったな。となれば今回はハードウエアでは吉例な「Lチカ」です。FPGAに書き込むビットストリームにはGPIOを搭載済です。Vitis IDEでHello Worldソースをチョイ直したらLチカできるハズ。 “帰らざるMOS回路(70) Xilinx Vitis、RISC-Vから吉例Lチカ” の続きを読む
帰らざるMOS回路(66) Xilinx Vitis、RISC-V MCS、ビルドはOK?
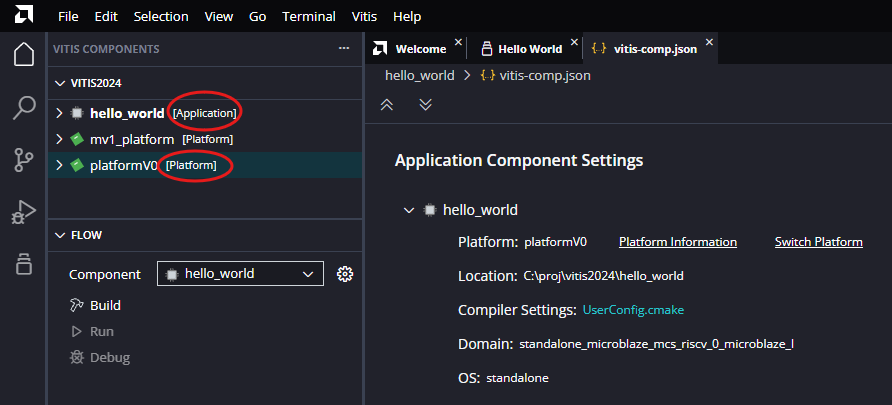
前回、RISC-V(MicroBlaze V MCS)の最小システム?を構成、Vivado上でのハード生成はOK。ソフトウエア開発環境であるVitisへ「輸出」も成功。しかしここまで。Vitisの使い方がそもそも分かっておらんことが発覚。ここで立ち往生とな。今回は心を入れ替えてVitisの使い方から学ぶっと。
帰らざるMOS回路(64) Xilinx Vivado、2024.1、RISC-V、公式登場

かねてXilinxがRISC-Vの「ソフト」コアを提供することがアナウンスされてましたが、以前は要NDAのアーリーな提供でした。今回 Vivadoの2024.1リリースにともない、RISC-Vコア(AMD Xilinx的にはMicroBlaze V)正式登場です。これはいけない、Vivadoを最新版に更新しないと。 “帰らざるMOS回路(64) Xilinx Vivado、2024.1、RISC-V、公式登場” の続きを読む
冥界のLSI(10) NEC(大昔の)Vシリーズ、シングルチップおまとめ
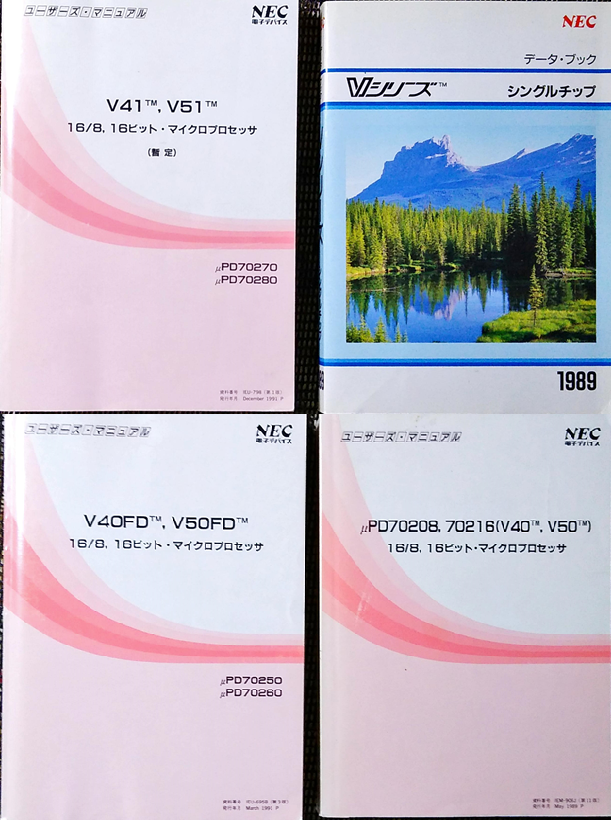
20世紀のチップ共の記憶が薄れゆく中、いくらかでも記憶にとどめるべく取りとめないこと書き連ねてます。今回は第7回「V41/V51、NEC版PC/XTワンチップ」の補足。NEC V30は「いろいろあって」多くの人が記憶にとどめているけれど、VシリーズにはMCUもSoC(当時はそういう名前はなかったけど)もあったのだよね。
“冥界のLSI(10) NEC(大昔の)Vシリーズ、シングルチップおまとめ” の続きを読む
モダンOSのお砂場(91) ArduinoとNucleo(Mbed OS6)間シリアル通信
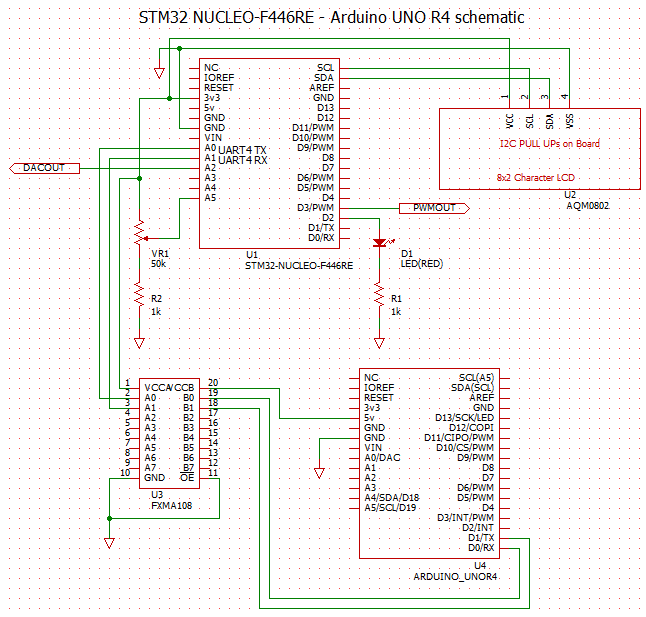
Arduino APIと比較しながらArm純正RTOS、Mbed OS6の入出力API群を練習中。前回はUARTといいつつ自分に送信するループバック試験。今回は「通信」らしくお相手Arduino UNO R4と接続してみます。また前回はBufferedSerialでしたが、今回はUnbefferedSerialを使用。
モダンOSのお砂場(90) NucleoでArduinoからMbed OS6、シリアル通信
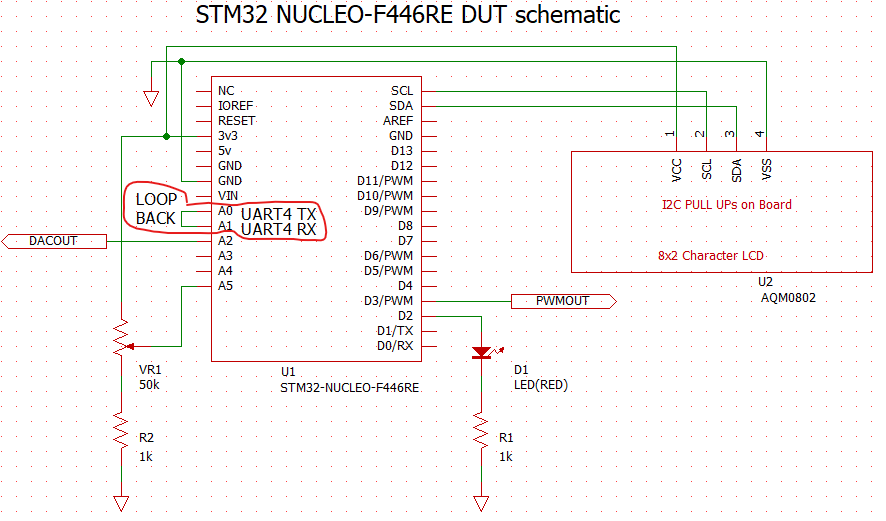
Arduino APIと比較しながらArm純正RTOS、Mbed OS6の入出力API群を練習してます。前回はシリアル通信といいつつ、デバッグ用のUSB経由ホスト行きのコマゴマしたところを確認。今回は実際にシリアル通信してみたいと思います。ありがちな「ループバック試験」だけれども。自分で自分と通信してみるもの。
モダンOSのお砂場(89) NucleoでArduinoからMbed OS6、printf
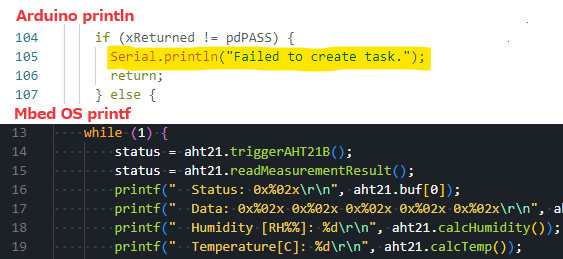
Arduino APIとの比較を通じてArm純正RTOS、Mbed OS6の入出力API群を練習してます。今回は入出力というより、デバッグ用のAPIです。printfね。USBを通じてホストPCの仮想シリアルポートにいろいろ情報を送り出すもの。いつもお世話になっておりますが、改めて再確認っと。
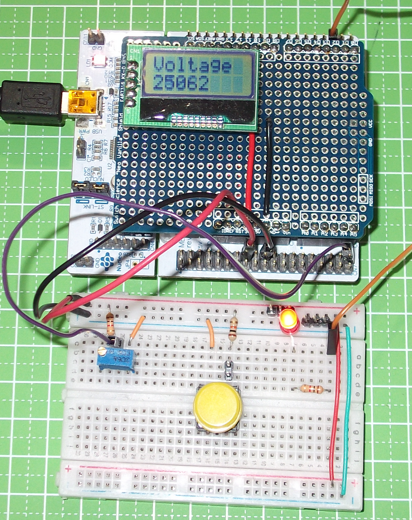
モダンOSのお砂場(88) NucleoでArduinoからMbed OS6、アナログ出力
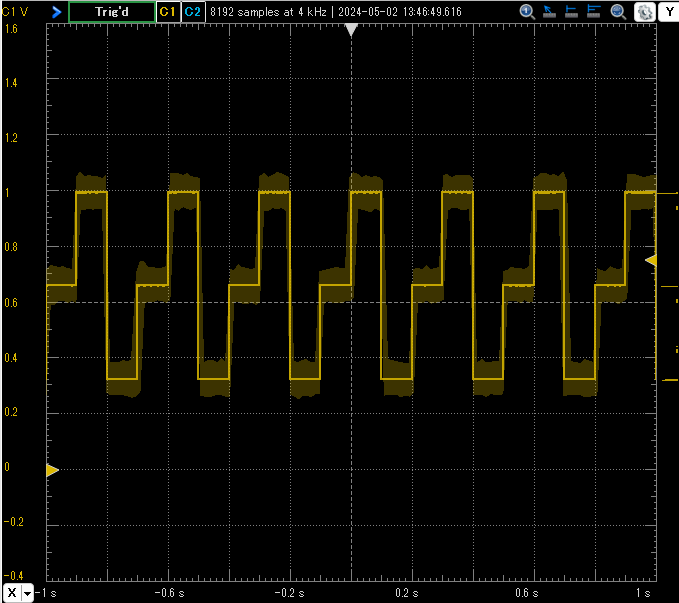
Arduino APIとの比較を通じてArm純正RTOS、Mbed OS6の入出力API群を練習してます。前回はPWM出力、今回はDAコンバータを使った「真の」アナログ出力です。対応ボードの都合上、Arduino側はUNO R4のみ。Mbed OS6側はNUCLEO‐F446REのみです。出力電圧を観察するだけ。
“モダンOSのお砂場(88) NucleoでArduinoからMbed OS6、アナログ出力” の続きを読む
モダンOSのお砂場(87) NucleoでArduinoからMbed OS6、PWM出力
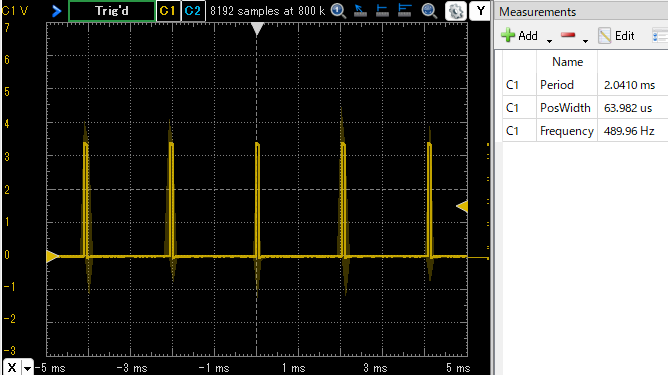
Arduino API比較をしつつ、Mbed OS6の入出力API群を練習中。前回はアナログ入力。順番からして今回はアナログ出力ですが、まずはPWM出力から。Arduino環境でanalogWrite()というとPWM出力だからです。電圧はデジタルだけれども時間方向はアナログ(時間の最小単位はデジタルだけれども。)
“モダンOSのお砂場(87) NucleoでArduinoからMbed OS6、PWM出力” の続きを読む
モダンOSのお砂場(86) NucleoでArduinoからMbed OS6、アナログ入力
Arduino APIとの比較をしながら、Mbed OS6の入出力API群を練習してます。前回は基本のキの字のデジタル入出力でした。今回はアナログ入力です。ADコンバータを使ってアナログ電圧を読み取るもの。コマケー話はいろいろあるケド、まずは読み取るところから。アナログ出力の方は2系統やらないとならないのでまた今度ね。
モダンOSのお砂場(85) NucleoでArduinoからMbed OS6、デジタルIO
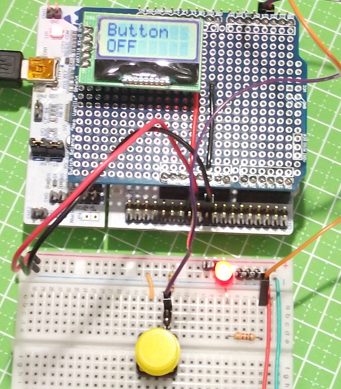
過去回でSTM32 NUCLEOボード上のMbed OSの練習実施。RTOSなのでついThread(Mbed OSではTaskでなくThreadと称します)だの同期だのに走ってました。しかしMbed OSはIOドライバも含めた立派なOSなのでIOの練習もいるよな、できればArduinoとの比較付でと思い至りました。
“モダンOSのお砂場(85) NucleoでArduinoからMbed OS6、デジタルIO” の続きを読む
モダンOSのお砂場(84)STM32 NucleoでMbed OS6、RAM使用量の取得
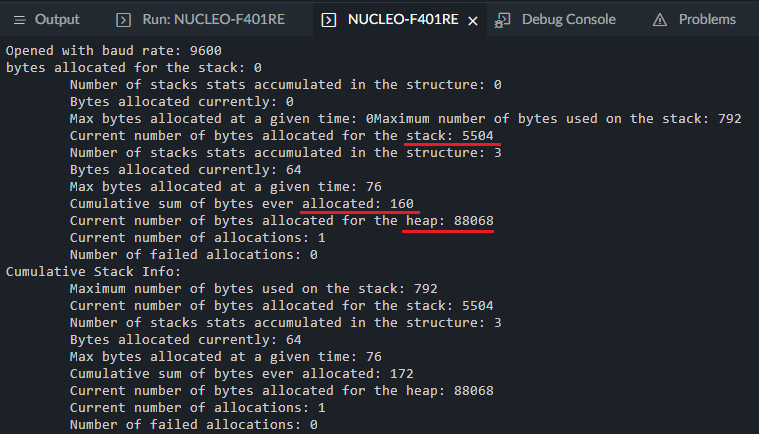
別シリーズ「やっつけな日常」第69回でMbed OS6に「流れ着き」ました。久しぶりにKeil Studio Cloudを開いたところ、いろいろ改良進んでいるみたいです。ただしビルド後の表示ではRAMは全量OSが使っているような表示で「実際どのくらい使っているのか?」が分かりませんでした。今回はAPIに聞いてみます。