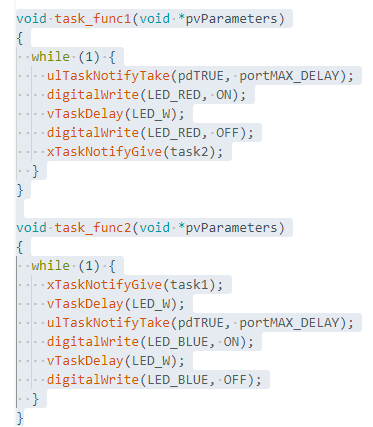
前々回、TaskのSuspendとResumeをやっています。これは停める相手の都合などお構いなしに停止するという乱暴な?ものでした。今回は「待っているのでよろしく」「起きてください」とお互いに尊重しあいながら停止、再開できるNotifyを練習してみます。お互いにGive and Takeちゅうことですかい。
モダンOSのお砂場(72) UNO R4、RA4M1でFreeRTOS、Notify
デバイス作る人>>デバイス使う人>>デバイスおたく
前々回、TaskのSuspendとResumeをやっています。これは停める相手の都合などお構いなしに停止するという乱暴な?ものでした。今回は「待っているのでよろしく」「起きてください」とお互いに尊重しあいながら停止、再開できるNotifyを練習してみます。お互いにGive and Takeちゅうことですかい。
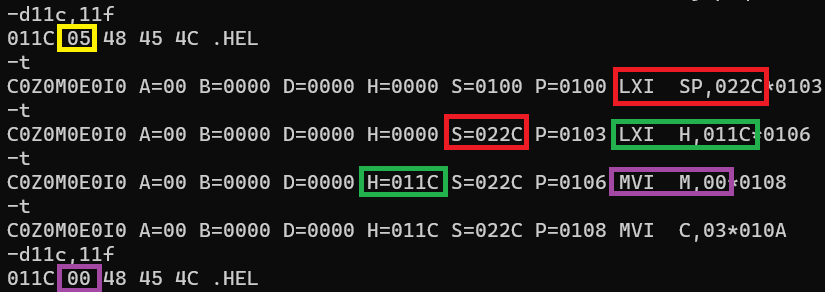
GDB(GNUのデバッガ)は今も活躍してますがそれは縁の下っす。プログラマの表に見える「煌びやかな」IDE環境の奥底でひっそりと動いておりますな。GDBレベルでデバッグする、というのは最近やらんな。今回使用してみるのはCP/M-80のデバッガDDTです。インテル8080用のデバッガっす。シンボリックですらないです。
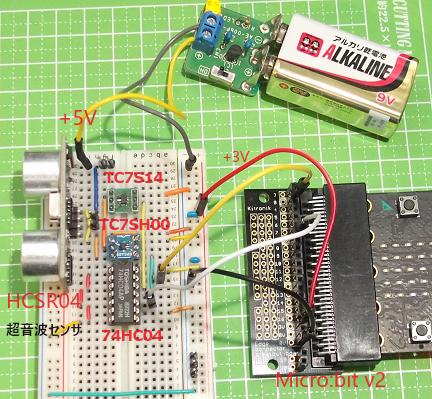
このところ御本家Go言語の標準ライブラリを試用してましたが、今回はTinyGoユニークなものに復帰。TinyGoのライブラリ「Devices」は各種の周辺デバイスを接続するときに役立つライブラリです。以前に使ったときは簡単接続、便利便利という感じでした。でもね。ちょっとメンドイことがないわけでもないです。まずは電源ね。
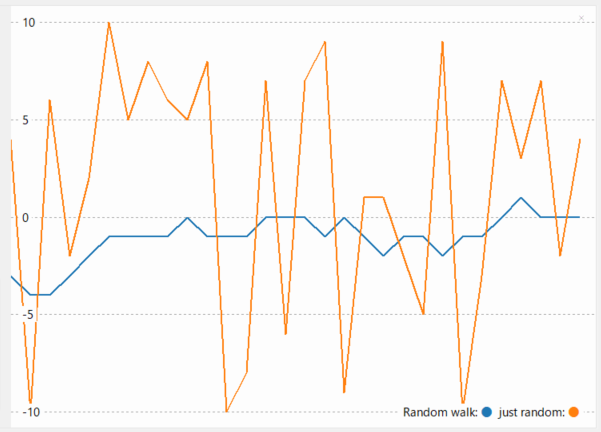
MicroPythonプログラムをマイコンに書き込むための開発環境としてThonny IDEを使わせていただいております。リトアニアエストニア製ね。しかし何時ものことですがウカツ。Thonny IDEにもシリアルプロッタ機能が組み込まれていたのね。Arduino IDEに搭載の機能と似た機能です。知ってりゃ使っていたよ、もう。
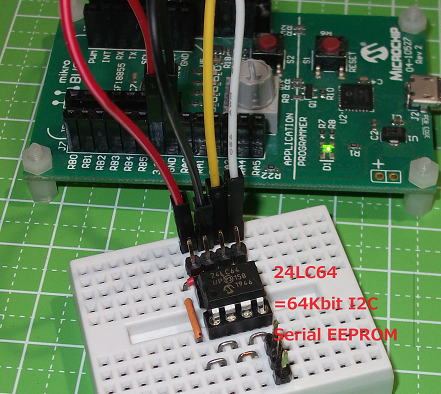
PIC16Fのペリフェラル回路を経めぐっております。今回はMSSPです。SPIもしくはI2Cとして使用できる同期式シリアルインタフェースのモジュールです。今回は同じマイクロチップ社製の24LC64をI2C接続。MCCが何でも簡単にしてくれるのでこれもチョロイとか思ったらそうでもないっす。I2Cもいろいろあるからね。
“PIC三昧(13) MSSP(I2C)で24LC64に読み書きしてみる、PIC16F18855” の続きを読む
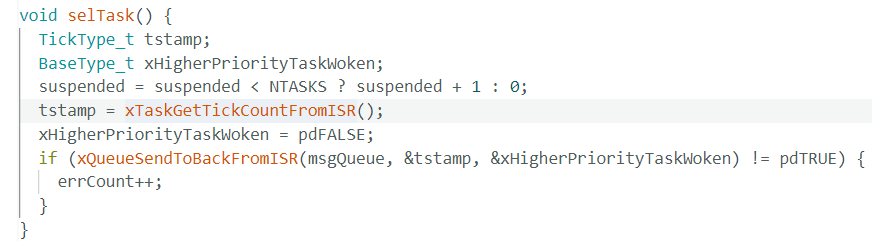
前回はタスクの一時停止と再開でしたが、その横で割り込みも使ってました。しかし割り込みとタスクの関係性は薄かったデス。そこで今回は、タスク側とも「分かり合える」スケジューラのタイムスタンプをQueueを使って送信することで割り込み発生タイミングをタスク側に伝えてみたいと思います。
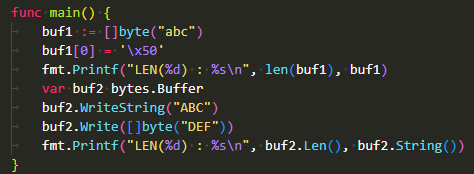
前回はcomplex128型などを使ってしまいました。マイコンでも使えるということで心強いけど滅多に使わんのではないかと。一方、普段から一番お世話になりそうなのが byte型であります。そして「byte」に似たものに「bytes」という標準パッケージがあり、そこにはbytes.Buffer型が存在。どんなもんだか。
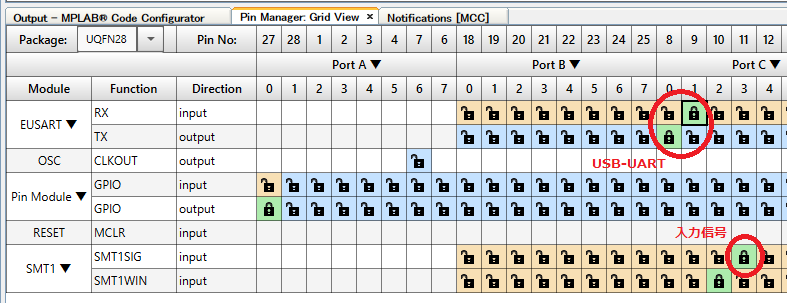
ほとんどのマイコンではタイマの横にコンペア/キャプチャ/PWMといった入出力チャネルがぶら下がっていてそれらを駆使することで入力イベントの時間間隔とか、パルス幅、周期といったことを測定できます。勿論PICマイコンも同様なことを出来るのですが、専用のFSMモジュールが用意されてます。専用モジュールなので設定もお楽。
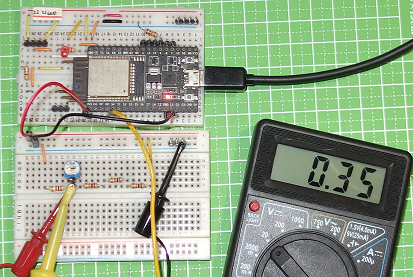
ここ数回、ESP32(Xtansaコア機)が搭載する「3つめの」プロセッサ・コア、ULPをMicroPythonから試用中です。前回はデジタル信号の入力を試行。今回はアナログ信号の監視に使えないか実験してみます。なかなかいい感じでないかい。メインが寝ている裏でひっそりと監視するのにULPはピッタリだな。やっぱり。 “MicroPython的午睡(121) ESP32版、ULPで電圧を測ってみる” の続きを読む
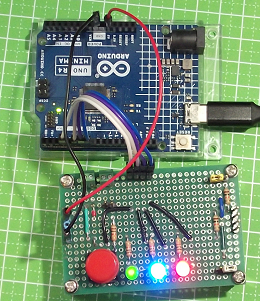
タスクの一時停止(suspend)と再開(resume)を実験しようとしたのですが、勝手な割り込み端子への思い込みに足をすくわれました。Arduino UNO R4は32ビット機になったわけだし、その辺の端子はみな割り込みに使えるんじゃね?大間違い!Arduino UNOの伝統にのっとり、2番、3番だけなのね。律儀。
“モダンOSのお砂場(70) UNO R4、ルネサスRA4M1でFreeRTOS、サスペンド” の続きを読む
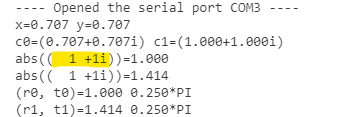
前回のキャリーだの、ボローだのの世界はこの老人には慣れ親しんだ世界にて居心地が良かったです。しかし今回使ってみるのは math/cmplxパッケージです。浮動小数点数ですらちょっと敷居が高いのに、そいつらの上に君臨する複素数はできれば避けたいデス。そんなこと考えていたら挙動不審。ムムムこの挙動はどゆこと?早合点よ。
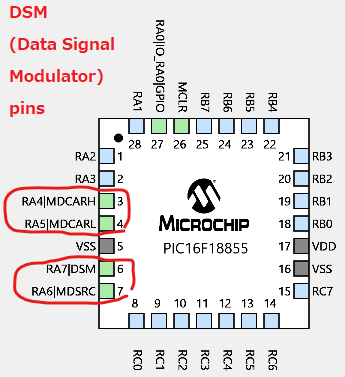
別件でFM変調をやったので、今回はPIC16F搭載のペリフェラルDSMをつかってFSK変調をやってみます。DSMはパルス信号対象ですが、FSK、PSK、OOKで変調することができるモジュールです。変調波をキャリアに同期する機能などのオプションもあり優れものじゃないかと。変調してくれとクリクリするだけで変調OK、お楽。
ESP32(Xtansaコア機)が搭載する「3つめの」プロセッサ・コアULPをMicroPythonから制御するための環境をESP32 DevKitC機にインストール済です。これは使ってみるしかないです。ということでまずはハイパルスのパルス幅を測定してみることにいたしました。まあね、できるっちゃできるけれども。
“MicroPython的午睡(120) ESP32版、ULPでパルス幅を測ってみる” の続きを読む
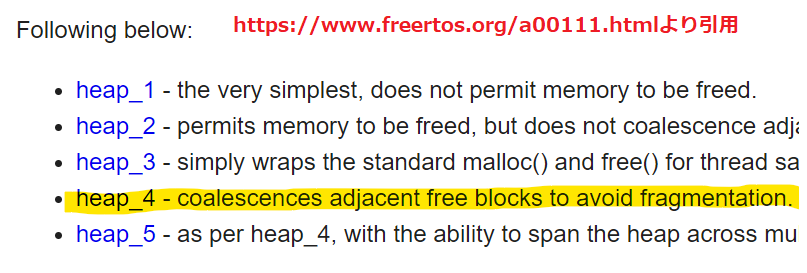
前回、FreeRTOSの各種設定を決めるFreeRTOSConfig.hを読んでいて「思っていたのと違う」ところがありました。勝手に思いこんでいただけなんだけれども。今回もそんな思い込みを正して参りたいと思います。メモリの割り当てについてです。どっかヒープから割り当ててくれているのでないの?