前回はスレッド間で通信するのにQueueを使ってみましたが、今回は似た「先入れ先出し」の構造でMailです。Mail便利です。こちらを使うとQueueには戻れない?便利なのは、詰め込むデータのためのメモリ領域の割り当て/解放の機能を含んでいるところ。alloc使うと後戻りできまっせん。
モダンOSのお砂場(42) Mbed OS6、Mail、allocちょっと気が咎めるけど便利
デバイス作る人>>デバイス使う人>>デバイスおたく
前回はスレッド間で通信するのにQueueを使ってみましたが、今回は似た「先入れ先出し」の構造でMailです。Mail便利です。こちらを使うとQueueには戻れない?便利なのは、詰め込むデータのためのメモリ領域の割り当て/解放の機能を含んでいるところ。alloc使うと後戻りできまっせん。
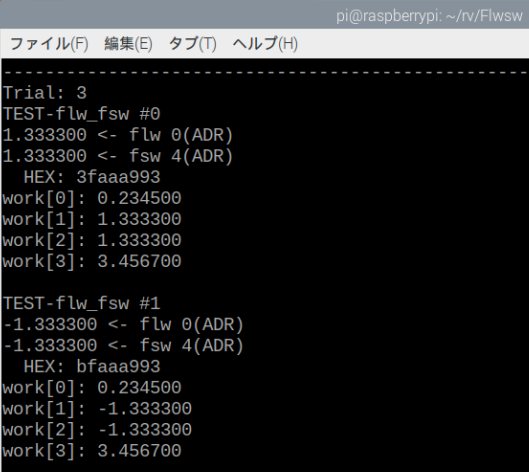
今回は珍しくメンドクない命令です。浮動小数のロード、ストアです。アドレスの指定は通常のロード、ストア同様に整数レジスタに12ビットのディスプレースメントを加える方式。これだけ。シンプル。RISCだもんね。

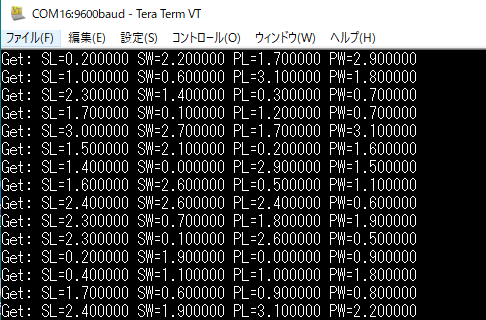
今回ラズパイPicoに取り付けてMicroPythonで制御してみるのは、ソフトウエアで抵抗値を設定できる可変抵抗、デジタルポテンショメータです。MicroChip社製MCP4018であります。ソフトで制御できるというと回路をいじらないでも何かいろいろ出来そうで嬉しい気もします。まあ使い道にもよりますが。

前回はWeaver変調器の原理を学ぶ、ということで三角関数の計算に突入してしまいました。しかし実際に計算したのはMaxima様で私は見ていただけですが。原理は分かった(ホントか)ということで、今回は実機にプログラムを書き込んでその特性を観察してみたいと思います。
今回はQueueを使ってみたいと思います。第34回で似たお名前のEventQueueというものを使ってみましたが、全く異なるものです。QueueはスレッドやISR間の通信のための仕組みで、EventQueueはノンプリエンプティブな制御権の移動の仕組みです。「よくある」Queueだと思ってやってみたのだけれど疑問あり。何故?
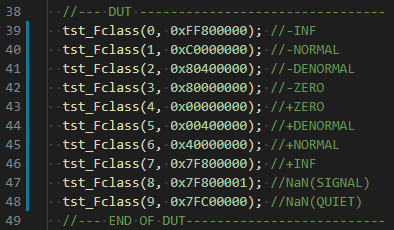
また、メンドクセー命令が出てきました。浮動小数点数のClassify命令です。無限大、デノーマル、NaNといった訳ありのモノドモを識別する命令。勿論、普通の(ノーマル)な数はノーマルと分類します。浮動小数点素人の私にはNaNの2種類あるビットパターンなど皆目見当がつかないです。
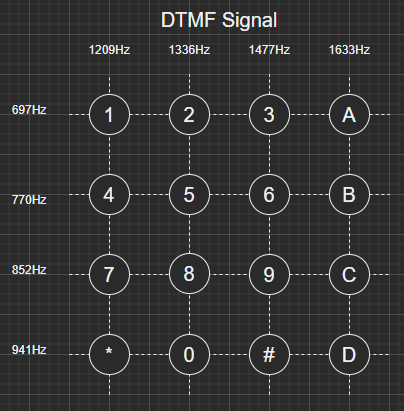
前回、懐かしの三洋電機製LC7366NをラズパイPicoのMicroPythonから制御してDMTFトーン(プッシュホンのピポパポ音)を発生してみました。1音、それも波形のみ観察でした。今回はスピーカを取り付けて16音全てを「聞いて」みたいと思います。耳で聞くのは良いけれど、トーンをデコードしてくれる相手がいないです。
前回はRabbit4000からラズパイに向かってPingかけるのを、ラズパイ上のWiresharkで覗き見してました。今回は、Rabbit4000とパケットをやり取りするトイメンとして、Python上のScapyを使ってみます。これでEthernetの両側をパケットレベルでプログラムできる筈。
前回ConditionalVariableをヤバイなどと言ってしまいましたが、どうもそんなこと無いみたいです。メモリの使い方がOS2とOS6で違うだけだったみたい。ボードもOSも「2種併用中」で混乱してました。さて、今回はEventFlagsです。スレッド間、あるいは割り込みサービスルーチンからイベントを他に簡単に伝えることができるもの。
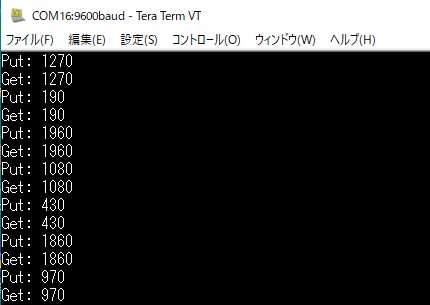
今回取り上げさせていただくのは、浮動小数点数の符号を操作するための命令「群」です。3命令「も」存在します。倹約を旨としてオペコード空間を割り当てているRISC-Vにしたら大盤振舞いにも見えましたが、例によって疑似命令という別名をみると「無いと困る」命令群でした。
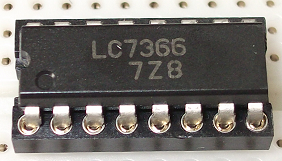
別投稿で音声フォルマント周波数をとり扱いました。その「反対」で音声フォルマントを外した代表例?DTMF=Dual-Tone Multi-Frequencyトーン生成用のICをラズパイPico上のMicroPythonから制御してみる1回目です。DTMF、電話の「ピポパポ」音。スマホでも「まだ」使えるけれど使わないか?
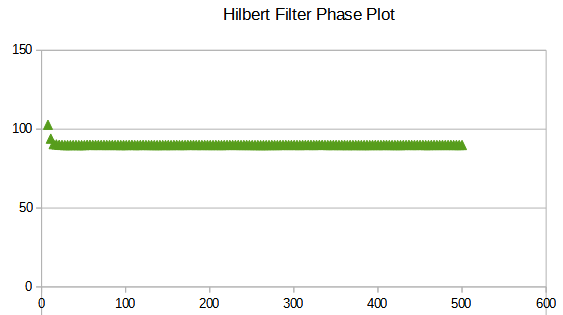
今回は「本丸」ヒルベルト変換フィルタ(位相シフタ)を調べて行きたいと思います。前回同様、動作確認済の全体プログラムの中のヒルベルト変換フィルタの出力を外部に出力し、位相特性を観察してみようという試み。ただし、期待されるフィルタの特性はIに対してQがπ/2だけ遅れるというもの。入力に対してでないので測りづらいです。
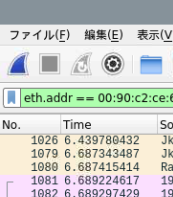
前々回、うさちゃんへPingしてお返事をもらいました。今回はうさちゃんからPingしてみます。通信相手はRaspberry Pi 3 model B+です。うさちゃんからのPingにラズパイからお返事をしながら、その様子を「みんな大好き」Wiresharkで観察してみたいと思います。うさちゃんに書き込むコードはサンプルコードほぼそのままです。
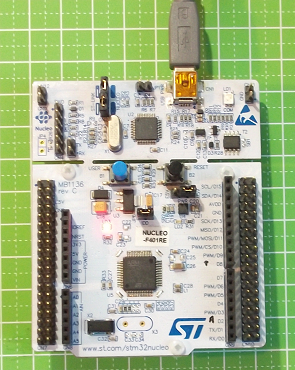
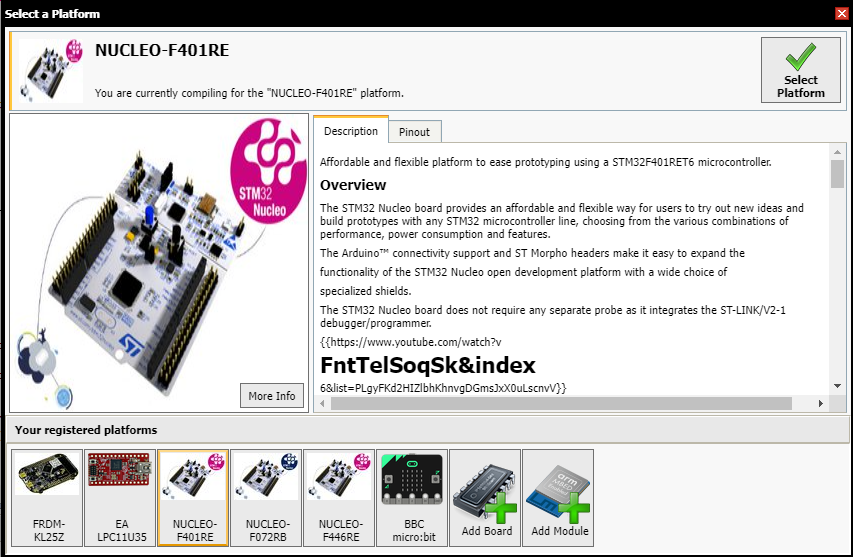
カッコイイ機能があるな、ということで使ってみました。ConditionalVariableであります。確かにカッコイイのですが、ターゲットのSTM32F401REにとっては結構ヤバイ奴でした。シンプルなサンプルコードなのにRAMがいっぱいいっぱいな感じ。何かコードを書けるような余地があるような気がしません。気のせい?
※2022/03/17追記:「気のせい」でした。すみません。OS6はZI Dataとして扱われる部分が多いためにヤバイなどと書いてしまいました。全然ヤバくありません。ヤバイのは自分。