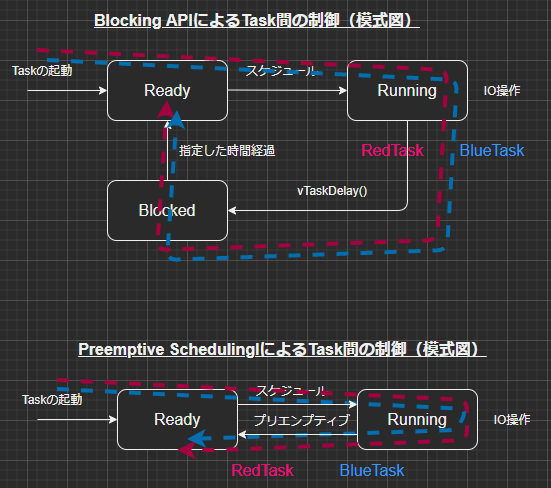
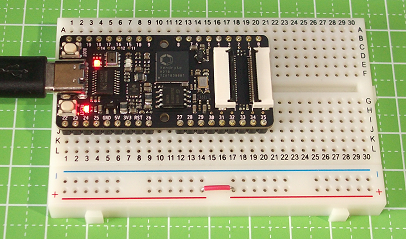
前回はFreeRTOSのスケジューラを起動をしたものの、Taskは1個だけでスケジューラのご利益はありませんでした。今回はTaskを2個にして、Blocking APIを使って「自主的に」制御権を手放すのと「プリエンプティブ」に制御権を取り上げて再スケジュールするのと両方のケースを観察してみたいと思います。実験に使用するのは、前回に続きSAMD21マイコン搭載Seeeduino XAIOボードです。 “モダンOSのお砂場(29) FreeRTOS、プリエンプティブなスケジューリング” の続きを読む
モダンOSのお砂場(29) FreeRTOS、プリエンプティブなスケジューリング