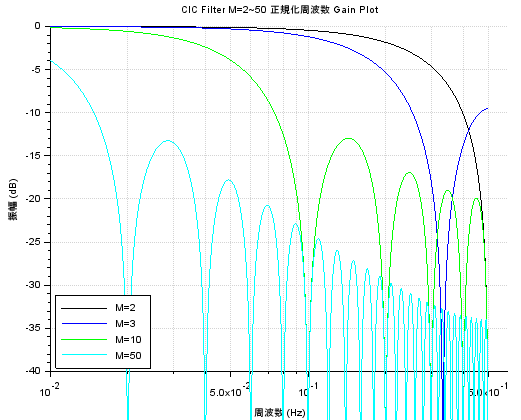
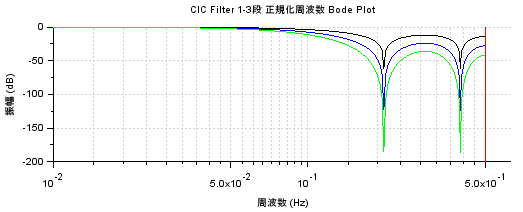
前回はアンダーサンプリングでした。今回はCICフィルタです。途中までやりかけて気づきました。僅か2か月ほど前にCICフィルタやってました。年寄りの忘却力は強力。既に頭の中から抜けてました。前回とは目的は違いますがCICはCIC、でも微妙に記号など違っていたので「チョイ直し」でお茶を濁しますです。すみません。 “手習ひデジタル信号処理(51) SDR、「CICフィルタ再び」Scilabでgainplot” の続きを読む
手習ひデジタル信号処理(51) SDR、「CICフィルタ再び」Scilabでgainplot