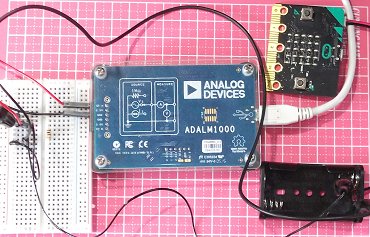
別件で、ダラダラとBBC micro:bit v2を動作させつづけているので、micro:bitの消費電力がチト気になってきました。しかし本日v2は忙しくしているので、お手すきのv1.5をターゲットにして測定。マイコンの場合、消費電流が動的に変化しまくるのですが、今回はADALM1000のSMUを使って捕捉してみました。
ブロックを積みながら(24) BBC micro:bit v1.5、消費電流測定その1
デバイス作る人>>デバイス使う人>>デバイスおたく
別件で、ダラダラとBBC micro:bit v2を動作させつづけているので、micro:bitの消費電力がチト気になってきました。しかし本日v2は忙しくしているので、お手すきのv1.5をターゲットにして測定。マイコンの場合、消費電流が動的に変化しまくるのですが、今回はADALM1000のSMUを使って捕捉してみました。
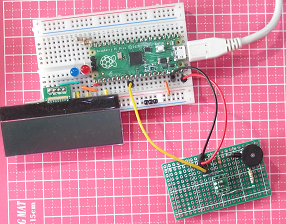
Raspberry Pi Picoに超音波センサHC-SR04を接続したおりに、NMOSトランジスタを使ったレベルシフト回路を使用いたしました。動作的には問題ないのですが、ロウが続く信号であると消費電流が気になります。そこでダラダラ電流の流れないレベルシフト回路を挿入してみました。老眼にはハンダ付けが辛い。
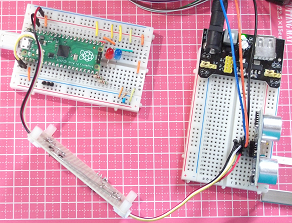
前回Raspberry Pi PicoのPIOを使ってパルス幅測定ができるようになりました。今回はその応用、HC-SR04超音波センサで距離の測定を行ってみたいと思います。距離に比例するパルス幅(時間)が返ってくるセンサです。細かいことを言わなければ測ったパルス幅を距離に換算するだけ。

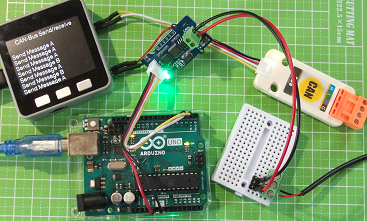
前回、M5StackとArduino Uno間でCANフレームの送受信ができるようになりました。しかしCANは「バス」です。1対1で通信できても物足りませぬ。そこで今回はST MicroelectronicsのSTM32マイコン搭載、Nucleo-F072RBをCANバスに接続してみます。でもね、PHYはMicrochip製MCP2562。
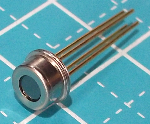
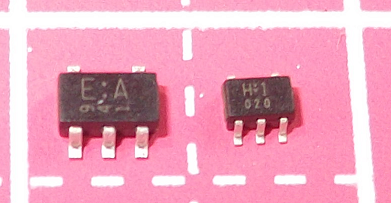
IoTセンサ図鑑に触発?されて、柄にもなくアナログなセンサに手を出しております。今回はSEMITEC製 10TPS83Tサーモパイル、非接触で温度を測ったり、生体を検出したりすることができるセンサです。センサの原理は素晴らしいものなのだけれどね、温度を測ろうとしたら中々大変であることをいろいろ納得?本当か?
アイキャッチ画像に掲げましたる小冊子は、何を隠そう(隠しませんが)CQ出版 インタフェース誌2021年7月号の付録です。本誌のテーマは「IoTプロトタイプ入門」とて、普段から本サイトでもやっておるような事が記事になっており、これは学び直さんと思った次第。
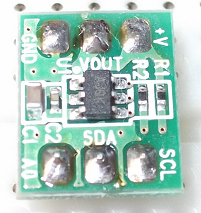
今回とりあげさせていただきますのは、マイクロチップ社製、12ビットのDAコンバータ MCP4725です。I2Cインタフェースで出力値を指定できるもの。加えてオンチップにEEPROMを搭載、出力値を記憶させ、電源投入と同時に所定の出力を得ることもできるデバイスです。

前回、ADALM1000(M1K)での電流測定にオフセットのっているじゃん、という1件あり。テキトーな対処でお茶を濁しました。しかし、そういえば「キャリブレーション」というお言葉を何処かで見たような。。。早速やってみたのですが、半分成功、半分失敗?やり方がマズイの?それともハード?混迷は深いです。
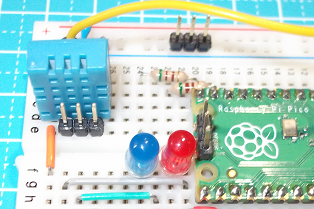
Raspberry Pi Pico上のMicroPythonで各種デバイスを制御してみております。今回は「電子工作業界?」定番の温湿度センサといってよいでしょう、DHT-11であります。「とりあえず」今回はソフトでタイミング制御、現物合わせです。動いているみたいなので、ま、いいか。
前回はM5StackからArduino Unoへ向かって一方通行のCANフレームの通信を行ってみました。当然、今回は双方向での通信の確認であります。お手軽にM5Stack発でUno経由M5Stack着の「ラウンドトリップ」です。同じArduino IDE使用で同じような仕事ですが、衣の下がちょっと違うのが見えまする。 “鳥なき里のマイコン屋(124) M5StackとUno間、CANフレームのラウンドトリップ” の続きを読む

別シリーズにてArduino用のCANバスIFと、M5Stack用のCANバスIFを手に入れ、ぞれぞれCANフレーム送信をロジアナ機能で確認いたしました。当然次のステップとしては2つをCANバスで接続して通信できることの確認です。今回はM5StackからArduinoへ一方通行にしたので簡単。
今回 Raspberry Pi Picoに接続する「定番の」部品はパッシブ・ブザーであります。片やONするだけで特定の周波数で鳴ってしまうアクティブ・ブザーに比べると、パッシブ・ブザーの場合、与える周波数を制御する必要はあるものの、音程を変えることができるので表現力が上回るっと。まあPWM波形を与えれば良いのでPWM出力に対応しているPicoにとっては何の問題もありませぬ。
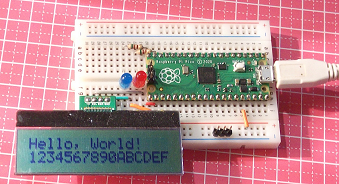
このところ Raspberry Pi Picoに各種デバイスを接続し、MicroPythonで操作してきております。が、定番のデバイス、どうせ接続できるでしょ、ということでやってませんでした。しかし、やっておかないと何が起きるかわからない。念のためということで今回は、秋月電子製LCDモジュールキット、AE-AQM1602Aであります。 “MicroPython的午睡(22) ラズパイPico、AQM1602 LCDパネル接続” の続きを読む
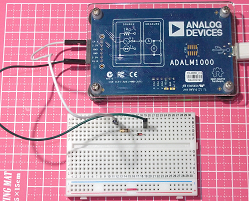
後1回「読み物」ありと思いつつ、今回は途上で断念、次の次に進んで「お手軽ツール」再登場による実験シリーズ再開いたしました。ともあれしばらく使用していなかったお手軽ツール(M1K)、ちゃんと動いてくれるのか。不安を残したまま再起動。ついでにこのところご無沙汰のLTspiceも再起動。