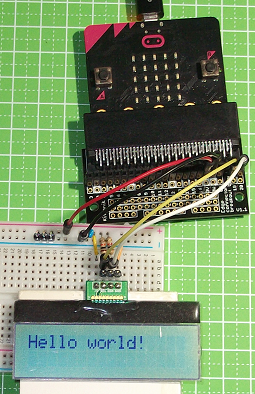
前回、TinyGoからみたmicro:bitのI2Cインタフェース関数の挙動を確認。今回は外部デバイスを接続してみます。まずはAQM1602LCD表示器(秋月電子製)を接続します。16文字x2行の文字表示ができるもの。以前にもmicro:bitに接続してますがそのときはMakeCode(JavaScript)でした。
GoにいればGoに従え(8) TinyGoでmicro:bitにAQM1602をI2C接続
デバイス作る人>>デバイス使う人>>デバイスおたく
前回、TinyGoからみたmicro:bitのI2Cインタフェース関数の挙動を確認。今回は外部デバイスを接続してみます。まずはAQM1602LCD表示器(秋月電子製)を接続します。16文字x2行の文字表示ができるもの。以前にもmicro:bitに接続してますがそのときはMakeCode(JavaScript)でした。
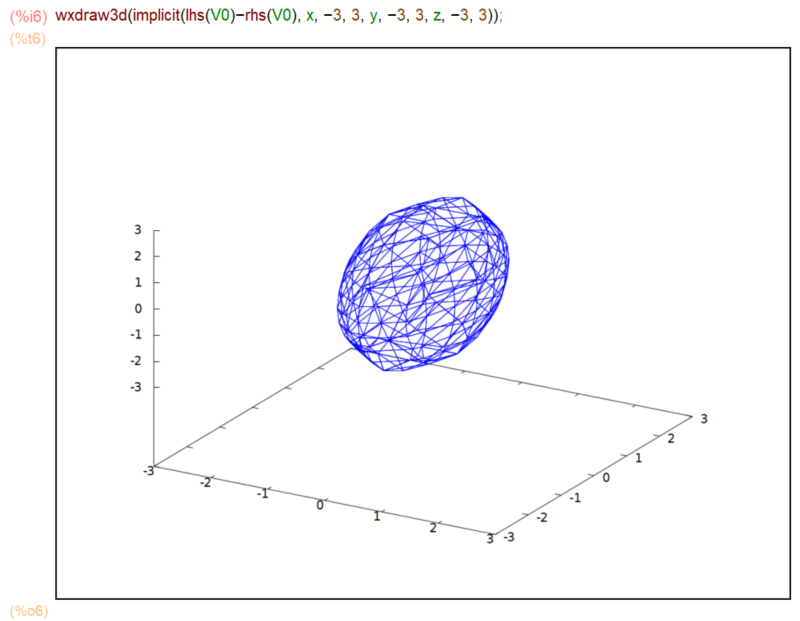
前回は極座標表示での定積分でしたが、今回は3次元での求積です。なんだか難しくなってきた?でも、やってみると(正確に言えばMaxima様にお願いすれば)定積分は一撃でした。結局断面積を求める方がムツカシかった?それに3次元プロットのやりかた忘却してるし。ポリゴンぐりぐりしたいんですけど。
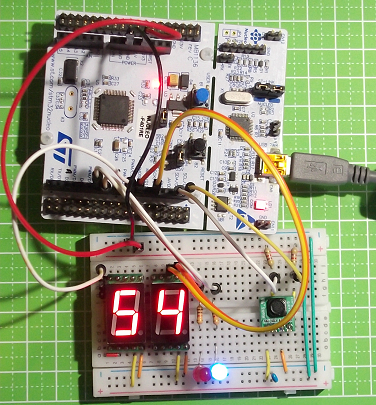
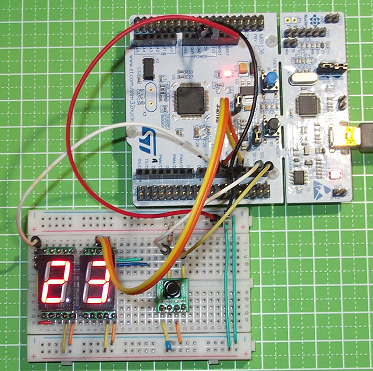
前回はNucleo-F406REボードにAHT21B温湿度センサを接続。接続済の7セグLEDに温度を表示しました。しかし、折角の温湿度センサなのに湿度が表示できません。そこでボードにもれなくついてくる青色のUSERボタンで温度表示と湿度表示を切り替えるようにいたしました。ついでに赤LEDなら温度、青LEDなら湿度とな。
サンプルデータセットは処理のお勉強のためのものなので嘘のデータであっても問題ないと。しかし、私、密かに、サンプルデータセットを通して世界の不思議と世の中を見ておりましたぞ。しかし今回のデータセット(fudged version)とうたっております。なんだこりゃ?何か隠す必要があったのか?大統領支持率。
アセンブルで止める-Sオプションとか、コンパイルで止める-cオプションの前に、プリプロセスで止める-Eオプションがあったの忘れてました。-Eオプション、多分、今までに使ったこと無かったかも。やってみるとね、まあ使わなかったのにも一理?ありな感じがあり。あまり複雑なプリプロセスしないもんね。触らずに済む方が平和?
前回投稿後にTwitterで@rithmety様のご指導あり、気になっていたところが解決。ありがとうございます。これでFIRフィルタの計算ができると思ったら、いけません。定数PI(円周率)はどこにいるの?だいたいSIN関数はどこ?頭の固いRust素人(老人)は戸惑うことばかり。今回は被テスト波形を計算するところまで。
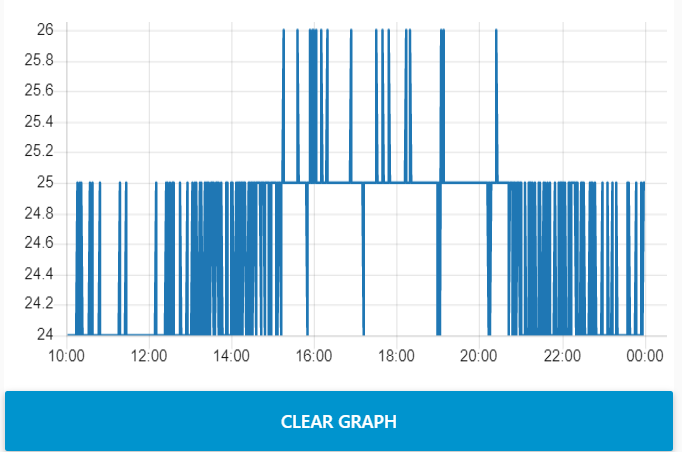
前回までで過去データに対するSQLクエリの結果の表はできた感じ。今回からはそのグラフ化に進みたいと思います。PythonとかRでグラフ描こうかと思ったのですが、本シリーズの趣旨もあり、まずはNode-REDの中で「やっつけ」たいと思います。以前から使わせていただいておりますDashboardのchartノード再登場。
“ブロックを積みながら(106) Node-RED、SQLクエリの結果をグラフ化” の続きを読む
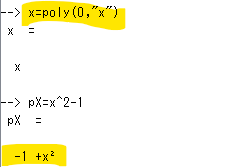
Scilabの基礎もないところに泥縄式でいろいろやってみているので、毎度「よくわからんな」が続出。砂上の楼閣状態です。伝達関数を記述するときに「お世話になる」polyという関数もそう。z=poly(0, “z”)みたいな「おまじない」を唱えること度々。どうも多項式を定義するためのものらしいんだけども。。。
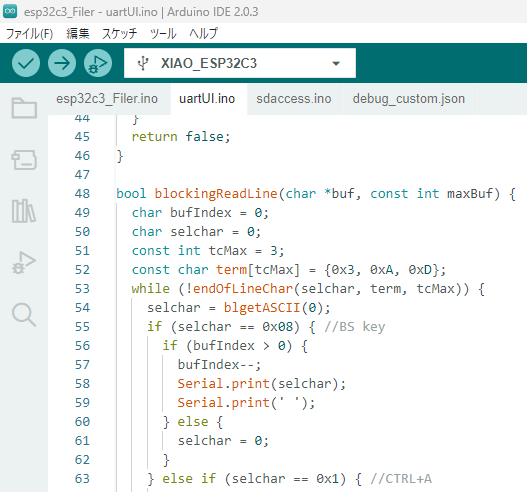
Arduino IDEにて複数 .ino ファイルの落とし穴に転落?から復活し、ESP32C3版Xiaoでの作業を再開しました。調べてみると既存ライブラリが複数あるというのに、UART経由でのコンソール的なものを自力作成するつもりです。車輪の再発明的な無駄な努力かと。今回はreadlineモドキから。 “IoT何をいまさら(115) ESP32C3版Xiaoで車輪の再発明的な「行入力」” の続きを読む
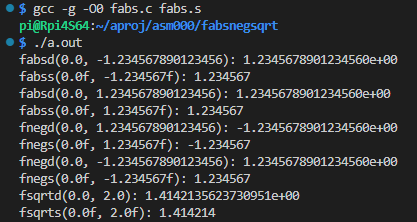
今回はFloating-point arithmetic(one source)のカテゴリを一気にやります。といっても3命令、FABS、FNEG、FSQRTです。例外とか「コマケー話」を避けていれば浮動小数点の演算そのものは素直で分かりやすい?です。そのうちメンドイ話もやらんといかんですが、今回は無し。平穏無事。。 “ぐだぐだ低レベルプログラミング(104)ARM64(AArach64)FABS、FSQRT他” の続きを読む
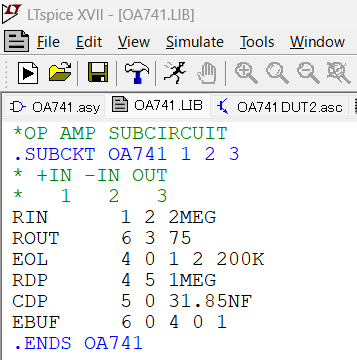
薄々知ってはいたのです。食わず嫌いでした。LTspiceのシンボルにシミュレーション用モデルを紐づけ。シンボルを配置すれば何も追加の記述することなくシミュレーション可能。いちいちシンボル作るのがメンドイと思っていたのですが、シンボルファイルはコピペでOK。それにLTspice、テキストのネットリストも編集できたのね。
今回からBBC micro:bitのI2CをTinyGoから操作してみたいと思います。しかしmachineモジュールの説明を読んでムムム。I2Cなんですが2個ありますな。過去、MakeCode、Mbed OS、MicroPythonなどでもmicro:bit使ってますがそんな選択迫られたことなかったデス。どっち?
“GoにいればGoに従え(7) TinyGoのmicro:bit向けI2C関数の挙動を観察” の続きを読む
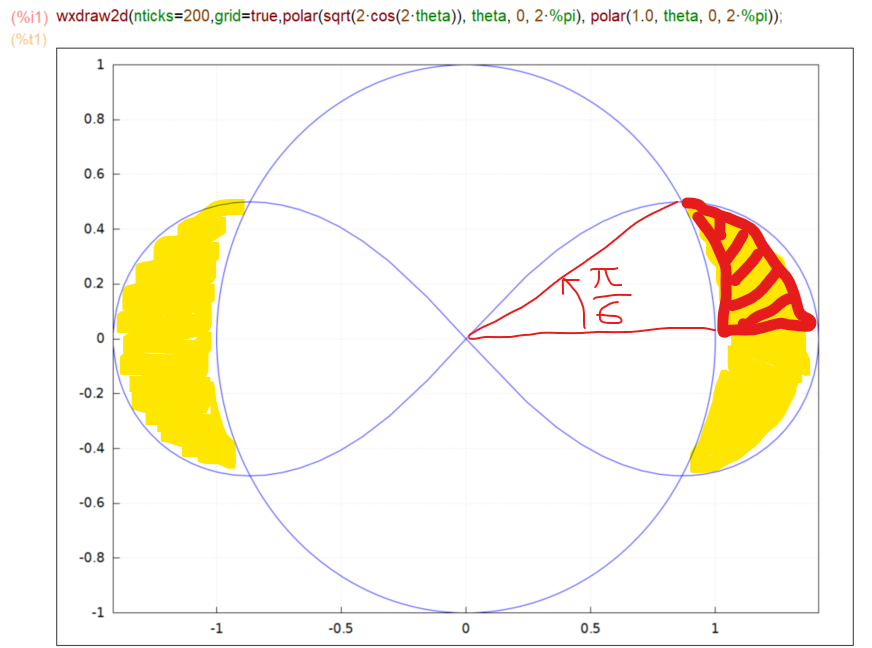
前回は媒介変数表示、今回は極座標表示です。どんどんメンドくなっているようでいて極座標表示での積分はお楽でした。本当か?しかしそのプロット、それも極座標表示のグラフ2つに挟まれた隙間の面積部分、塗りつぶし方がわからないっす。苦し紛れに手で塗りました。グラフの塗りつぶし方の練習も必要ね。 “忘却の微分方程式(84) 反復練習47、極座標表示の曲線に挟まれた面積、Maxima” の続きを読む