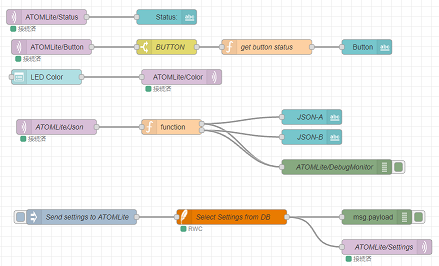
前回までで「エッジ側」M5ATOM LiteとNode-REDサーバー(Raspberry Pi 3)との間でMQTTを介してJSONオブジェクトを送受できるようになりました。しかし不満なのは送受信のタイミングです。前回まで単一のmainループにお任せだったので便利とは言えない仕組みでした。今回から uasyncioを使って改良していきたいと思います。
MicroPython的午睡(46) uasyncioでMQTT送受信、ATOMLite
デバイス作る人>>デバイス使う人>>デバイスおたく
前回までで「エッジ側」M5ATOM LiteとNode-REDサーバー(Raspberry Pi 3)との間でMQTTを介してJSONオブジェクトを送受できるようになりました。しかし不満なのは送受信のタイミングです。前回まで単一のmainループにお任せだったので便利とは言えない仕組みでした。今回から uasyncioを使って改良していきたいと思います。
今回は、シフト命令を使って行きたいと思います。ハッキリ言ってシフト系の命令冷遇されています。16ビットの圧縮命令にエンコードしてくれるオペランドは限られているし、ローテイト命令など基本命令セットであるRV32Iには含まれとりません。最低限必要なものは用意したので、後はコンパイラでよしなに、という感じですか。
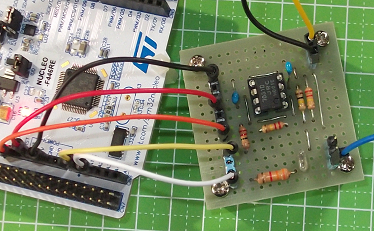
別件でSTM32とRP2040でAD, DAを使っているので、ATSAMD51でもやるべしと思い立ちました。先立つものはサンプリング周波数のタイミングということでTC7でタイミング(割り込み)を作ろうとしてハマりました。なぜか割り込み立て続けに入り過ぎ。そのあおりでオブジェクトのダウンロードすら不能。困りました。
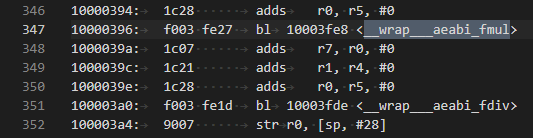
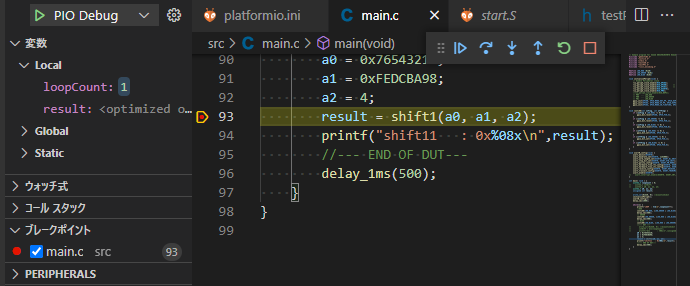
今回は1点確認するだけであります。ラズパイPico上で float型 を使ったら RP2040の内の「fast floating point」を呼んでくれているのだよね、と。ラズパイPicoで積極的にfloatを使いたいとは思わないのですが、昨日 Cortex-M4F機(STM32F446RE)の上で float していたので、Picoの上の浮動小数点はどうなの?と気になったためです。
シリーズ3回目ともなり、ようやく今回はちょっとデジタル信号処理っぽいところに入れます。とはいえ、まずは「動かして効果を実感してみよ」という感じです。実際の信号処理は裏のライブラリで処理されているものを使っているだけでお勉強はまだ後です。しかしま、衣の下(鎧ですぞ)がようやくチラチラしてきました。

前回が「送信」であったので、今回は当然「受信」です。しかし受信で想定しているのは何か設定値がホストから指令されてくるというシーン。「設定値」ともなるとそれを保存しておく場所から用意しておかないとマズイ気がします。そこで、設定値はNode-REDからアクセスできるSQLiteのデータベースに記録しておき、それを取り出して送ることに。今のところ何も効果はないですが。
周辺回路の動作完了をキッカケにメモリへ転送(DMA)とか、タイマのトリガでAD変換始めるとか、CPUの介在なしに装置間で制御を伝えることがあります。その中でもMicrochip社のATSAMマイコンが搭載しているEVSYSというものは極めて強力、ほとんどの周辺装置間でコミュニケーションがとれます。今回はTRNGでPort出力を制御してみます。
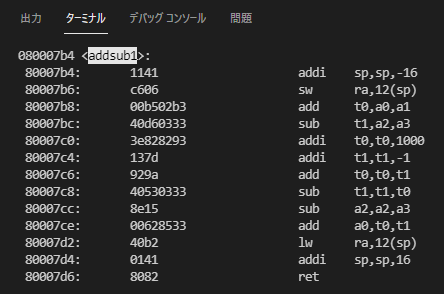
前回は、論理演算 and命令を使って、オペランドによって生成される命令がRV32Iだったり、RV32Cになったりするのを目にしました。今回は算術演算 add と sub です。RISC-Vに「直交的な」エンコーディングを想像してはなりませぬ。今回は2つの命令の「割り切った」関係を観察したいと思います。割り算じゃないけど。
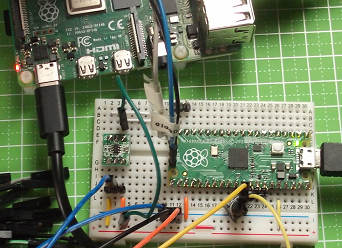
前回は、ラズパイPicoにI2C接続の外付けのDAC、MCP4725を接続してノコギリ波など出力させてみました。今回はラズパイPicoの内蔵ADCで得たアナログ値をそのまま外付けDACに「転送」してアナログ波形を「再現」してみます。ぶっちゃけSTM32で昨日やった件のまねっこ。タイミングの取り方が異なるし、外付けDACは転送ネックだし、どうなることか。
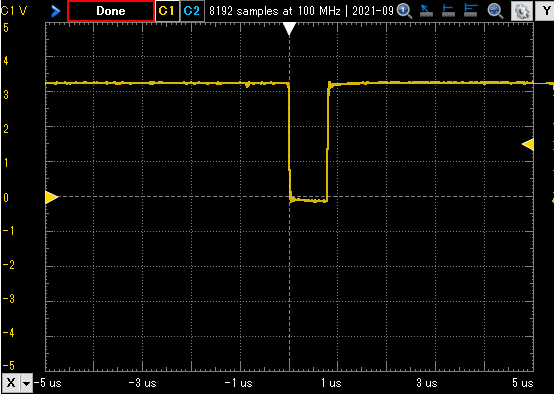
前回はADからDAへの「垂れ流し」ポーリング方式を勉強させていただきました。今回は割り込み方式です。そんな悠長に刻んでいたら死ぬまでに読み終わらない、とも思ったのですが、ちょっと立ち止まってSTM32F446REのハードを確認しておくことにいたしました。ロウレベルなところが気になると夜も眠れませぬ。
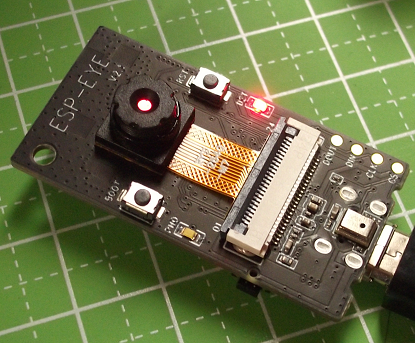
Espressif製の「AIoT」開発ボード、ESP-EYEを入手いたしました。ぶっちゃけESP32のDevkitに、カメラとマイクを搭載した小型ボードという感じです。売りは “Voice Wake-up” と “Face Recognition” です。今回は出荷時状態のまま、電源入れて、一声かけて?カメラを起動、写真を1枚キャプチャしてみました。私の中国語通じちゃう?
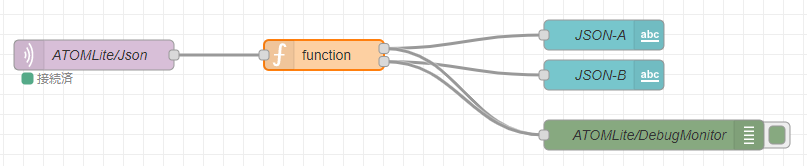
前回 MQTT Subscribe ができたので、MicroPythonで動いているM5ATOM LiteとNode-REDを動かしているRaspberry Pi 3機で上り下りの通信がOKとなりました。今回は、通信内容をJSON化して後で拡張しやすいようにしてみたいと思います。まずはPublish側から。使用するMicroPythonモジュールはujsonです。
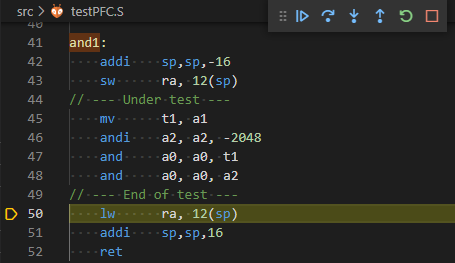
前回、RISC-Vにmv(move)命令は実は無いのだ、という衝撃?の事実をおさらいしました。今回は、and(論理積)命令です。andみたいなプリミティブな操作の命令に何か細工をする余地などあるのか?ま、当然「工夫」があるわけですが。でもね、andとorとxorは一緒、流石に。1回で3命令進捗!
ATSAMD51マイコンのEVSYS、CPUのお手を煩わせずいろいろできて良いものです。その実験をしていて問題が一つ。イベントでPORTを操作してみたところ、1ポートグループあたり4端子まで制御出来る筈が1端子しか反応しませぬ。なにがいけない? Microchip社のエラッタも念のため見たけど、書いてないです。