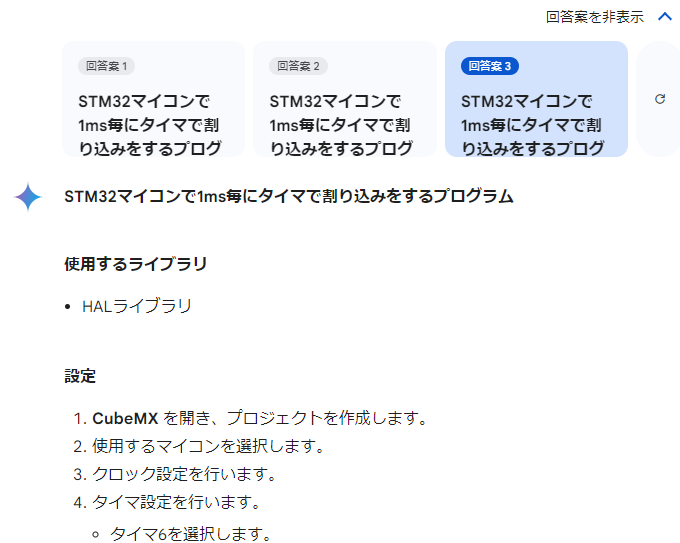
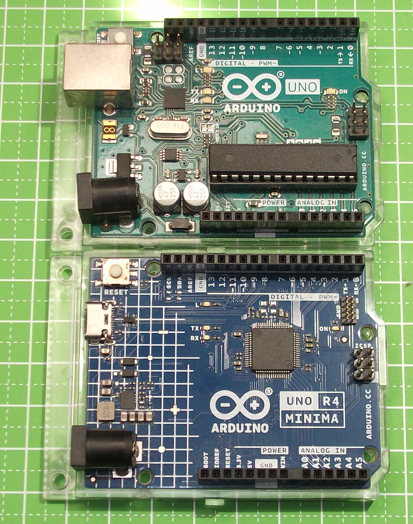
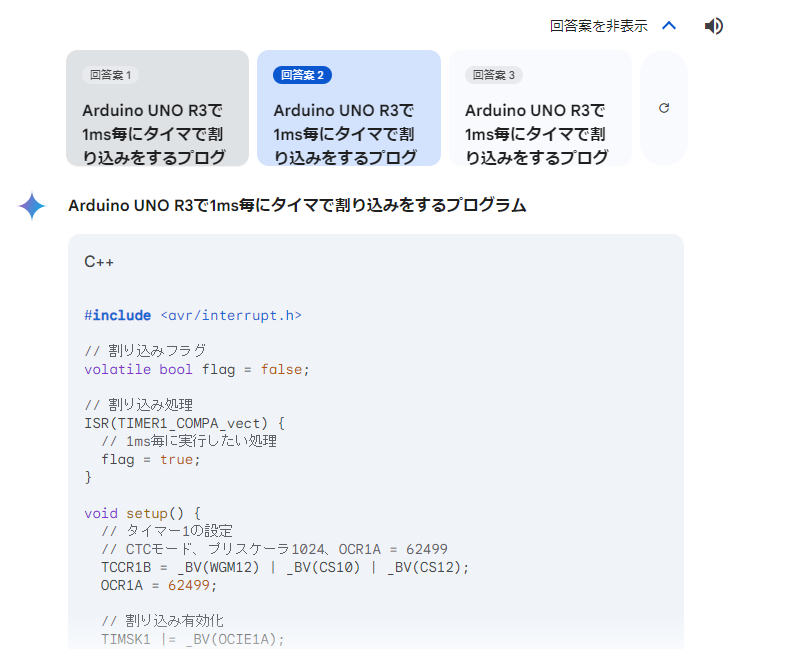
前回、前々回とArduinoボード上でのタイマ割り込みのプログラムをGemini様に生成いただきました。結果をみると UNO R3ボード向けにはコピペしてビルドしてボード上で動作できるソースが生成された反面、UNO R4ボード向けにはダメダメでした。今回はSTM32マイコンをターゲットに同じことをお願いしてみます。 “AIの片隅で(37) Googleの生成AI、Gemini、STM32にタイマ割り込みかけて” の続きを読む
AIの片隅で(37) Googleの生成AI、Gemini、STM32にタイマ割り込みかけて